lftdata
Decompose uncertain objects into fixed certain and normalized uncertain parts
Syntax
Description
[
returns a structure array M,Delta,BlockStructure] = lftdata(A)BlockStructure, where
BlockStructure(i) describes the ith normalized
uncertain element. You can use this structure to specify the uncertainty structure for
singular value analysis with mussv.
[
returns the cell array M,Delta,BlockStructure,normunc] = lftdata(A)normunc of normalized uncertain elements. Each
normalized element has 'Normalized' appended to its original name.
lft(blkdiag(normunc{:}),M) is equivalent to A. The
normalizations for each type of uncertain element are described in Decomposing Uncertain Objects.
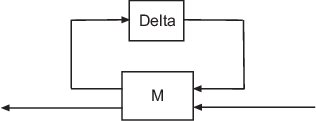
[___] = lftdata(
separates A,List)A into M in feedback with
Delta, such that Delta that includes only the
uncertain elements of A specified in List. All
other uncertainty in A remains in M.
lftdata(A,fieldnames(A.Uncertainty)) is the same as
lftdata(A). This kind of separation is called partial
decomposition. You can use this syntax with any of the output-argument
combinations.
Examples
Input Arguments
Output Arguments
Version History
Introduced before R2006a