lidarScan
2차원 라이다 스캔을 저장하기 위한 객체 생성
설명
lidarScan 객체는 단일 2차원 라이다(LIDAR, Light Detection And Ranging) 스캔에 대한 데이터를 포함하고 있습니다. 라이다 스캔은 센서가 일정 거리(Ranges)와 특정 각도(Angles)로 환경 내 장애물까지 측정한 2차 평면의 레이저 스캔입니다. 이 레이저 스캔 객체를 matchScans (Navigation Toolbox), controllerVFH (Navigation Toolbox) 또는 monteCarloLocalization (Navigation Toolbox)과 같은 다른 로보틱스 알고리즘에 대한 입력값으로 사용합니다.
생성
설명
scan = lidarScan(ranges,angles)ranges와 angles에서 lidarScan 객체를 만듭니다. ranges 입력값과 angles 입력값은 동일한 길이의 벡터이며, Ranges 속성과 Angles 속성에 직접 설정됩니다.
scan = lidarScan(cart)lidarScan 객체를 만듭니다. 이 입력값으로부터 직접 Cartesian 속성이 설정됩니다.
scan = lidarScan(scanMsg)LaserScan (ROS Toolbox) ROS 메시지 객체에서 lidarScan 객체를 만듭니다.
속성
객체 함수
plot | Display laser or lidar scan readings |
removeInvalidData | Remove invalid range and angle data |
transformScan | Transform laser scan based on relative pose |
예제
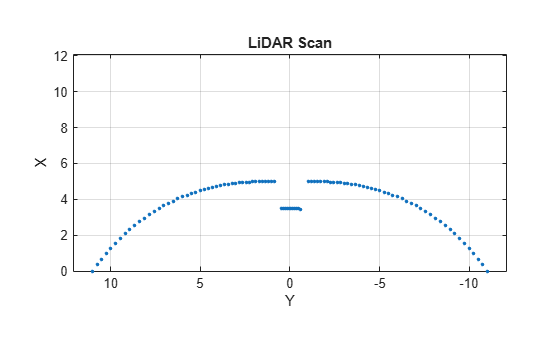
라이다 데이터를 거리와 각도로 구성된 벡터로 지정합니다. 이들 값에는 센서 거리를 벗어난 측정값이 포함되어 있습니다.
x = linspace(-2,2); ranges = abs((1.5).*x.^2 + 5); ranges(45:55) = 3.5; angles = linspace(-pi/2,pi/2,numel(ranges));
거리와 각도를 지정하여 라이다 스캔을 만듭니다. 라이다 스캔의 모든 점을 플로팅합니다.
scan = lidarScan(ranges,angles); plot(scan)
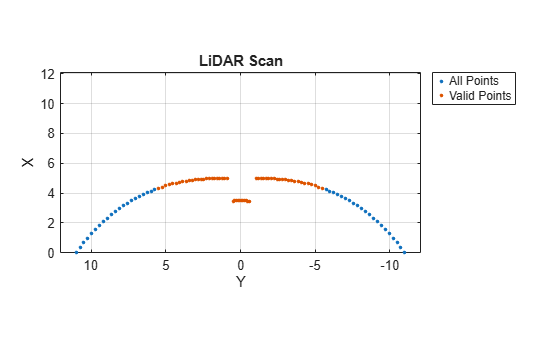
지정된 최소 및 최대 거리를 기준으로 유효하지 않은 점을 제거합니다.
minRange = 0.1; maxRange = 7; scan2 = removeInvalidData(scan,'RangeLimits',[minRange maxRange]); hold on plot(scan2) legend('All Points','Valid Points')
lidarScan 객체를 만듭니다. 거리와 각도를 벡터로 지정합니다.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
레이저 스캔을 [x y] 오프셋 (0.5,0.2)로 변환합니다.
transformedScan = transformScan(refScan,[0.5 0.2 0]);
레이저 스캔을 20도 회전합니다.
rotateScan = transformScan(refScan,[0,0,deg2rad(20)]);
확장 기능
버전 내역
R2019b에 개발됨