ROS 및 ROS 2 연결 인터페이스 시작하기
Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators를 사용하면, Universal Robots의 Universal_Robots_ROS_Driver 및 universal_robot ROS 패키지를 사용하여 Universal Robots의 물리적 협동로봇 또는 Gazebo와 URSim의 시뮬레이션된 협동로봇을 연결하고 제어할 수 있습니다.
응용 사례의 최종 목표가 Universal Robot 협동로봇만을 독립적으로 조작하는 것이라면 교시 조작기와 Polyscope 소프트웨어를 사용한 제어 및 연결 워크플로가 이상적인 솔루션입니다. 그러나 대부분의 로보틱스 사용 사례에서 환경은 다수의 로봇과 센서로 구성되며, 독립적 조작은 흔하지 않습니다. 이러한 시나리오에서는 하드웨어 추상화, 장치 드라이버, 라이브러리, 시각화, 메시지 전달, 패키지 관리 등의 내재된 장점으로 인해 ROS가 널리 사용됩니다.
지원 패키지는 사용자 친화적인 설정 화면으로 구성되어 있으며 ROS, Gazebo, URSim 시뮬레이터를 설치하고 구성할 수 있습니다. 또한 이 패키지는 urROSNode 및 urROS2Node 객체와 여러 관련 함수로 구성되어 있어서 다양한 로봇 상태를 읽고, 작업 공간이나 조인트 공간에서 로봇을 제어하고, 작업 공간이나 조인트 공간에서 미리 정의된 궤적을 따르고, 로봇 모션을 기록할 수 있습니다.
urROSNode 객체를 사용하는 방법에 대한 자세한 내용은 Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots 예제를 참조하십시오.
urROS2Node 객체를 사용하는 방법에 대한 자세한 내용은 Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots using ROS 2 예제를 참조하십시오.
urROSNode 객체와 urROS2Node 객체에는 로봇의 개별 조인트 각도와 카테시안 자세를 제어하는 함수가 있습니다. 좀 더 고급 수준의 함수는 Robotics System Toolbox 기능을 사용하여 3차원 공간에서 매끄러운 궤적을 추적하는 데 필요한 조인트 각도를 계산하는 방법과 로봇이 미리 계산된 궤적을 추적하도록 명령하는 방법을 보여줍니다.
함수
urROS2Node | Connection to simulated cobot or physical cobot from Universal Robots over ROS 2 (R2024a 이후) |
urROSNode | Connection to simulated cobot or physical cobot from Universal Robots over ROS (R2024a 이후) |
universalrobot | (Not recommended) Connection to simulated cobot or physical cobot from Universal Robots (R2022a 이후) |
getJointConfiguration | Get current joint configuration from the robot (R2022a 이후) |
getCartesianPose | Get current end-effector pose from the robot (R2022a 이후) |
getEndEffectorVelocity | Get current end-effector velocities from the robot (R2022a 이후) |
getJointVelocity | Get current joint velocities from the robot (R2022a 이후) |
getMotionStatus | Get current motion status of the robot (R2022a 이후) |
followTrajectory | Command robot to move along the desired joint space waypoints (R2022a 이후) |
followWaypoints | Command robot to move along the desired task space waypoints (R2022a 이후) |
sendCartesianPose | Command robot to move to desired Cartesian pose (R2022a 이후) |
sendCartesianPoseAndWait | Command robot to move to desired Cartesian pose and wait for the motion to complete (R2022a 이후) |
sendJointConfiguration | Command robot to move to desired joint configuration (R2022a 이후) |
sendJointConfigurationAndWait | Command robot to move to joint configuration and wait for the motion to complete (R2022a 이후) |
recordRobotState | Log the key robot state parameters during motion of robot (R2022a 이후) |
executePrimaryURScriptCommand | Execute primary URScript command to control cobot over ROS interface (R2023a 이후) |
executeSecondaryURScriptCommand | Execute secondary URScript command over ROS interface (R2023a 이후) |
handBackControl | Get the control back from the External Control program node in the UR program tree (R2023a 이후) |
도움말 항목
- Select Simulator for Universal Robots
Select URSim or Gazebo.
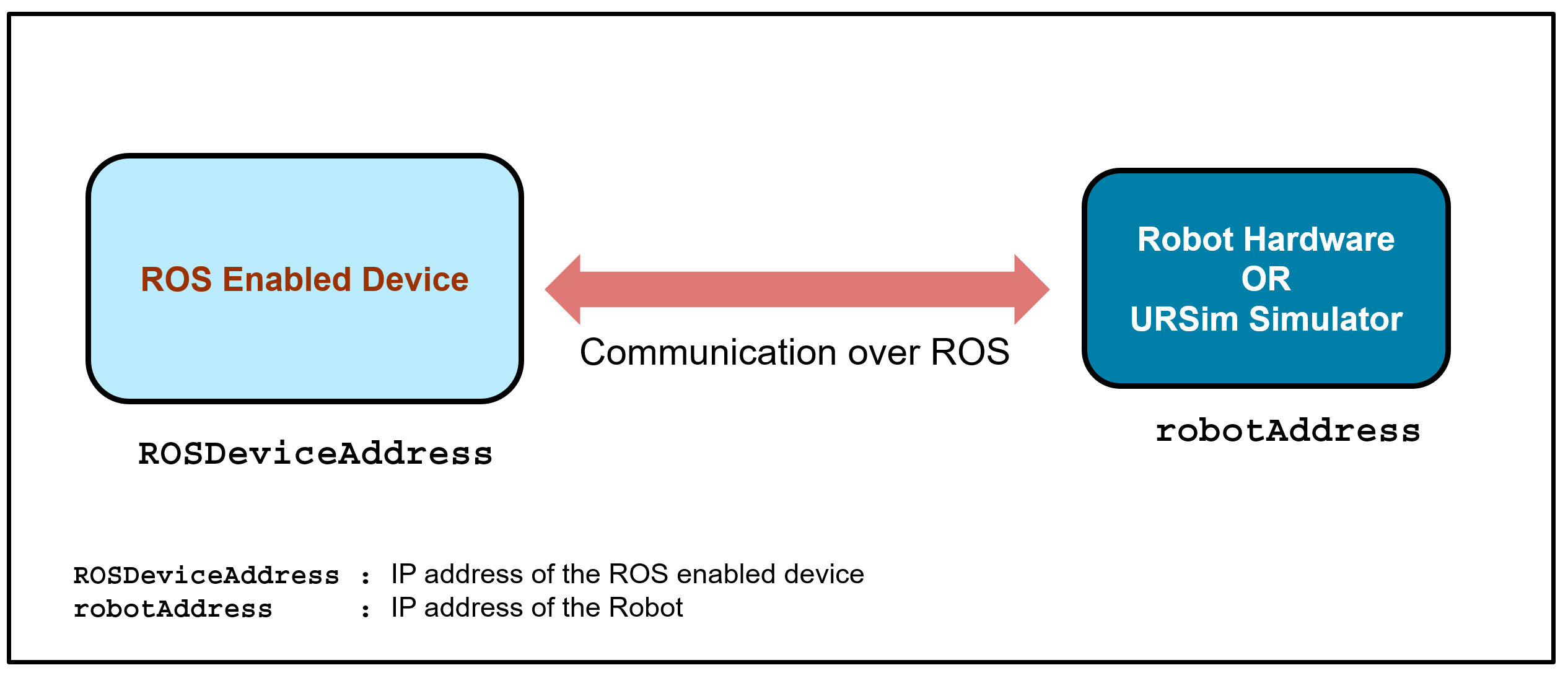
- ROS Interface for Universal Robots
Use ROS interface for complex applications with Universal Robots.
- Launch and Set Up URSim
Launch and load the program in URSim.
- Control ROS Enabled End-Effector Using MATLAB
Use ROS drivers along with end-effectors for Universal Robots.
- Installation of ROS Drivers for Intel RealSense Devices
Install ROS drivers for RGBD camera for bin picking examples.
문제 해결
Troubleshoot issues when simulating Universal Robots cobots using URSim or Gazebo.
추천 예제

Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots
Move UR5 cobot using joint space control, task space control, and waypoint tracking in task space and joint space in ROS.

Simulate a Universal Robots UR5 Using MATLAB and Gazebo for Glue Dispensing on a Windshield
Demonstrate motion planning for a glue dispensing application using UR5 cobot and simulate it in Gazebo.
Getting Started with Standalone ROS Node Generation for Universal Robots
Plan, create and validate a deployable motion planning standalone ROS node for UR5e robot with URSim, Gazebo or physical UR5e.
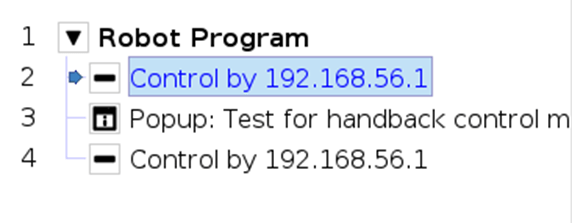
Getting Started with URScript Execution Commands and Handback Control for Universal Robots
Use specific functions to configure additional program nodes with MathWorks External Control URCap node for Universal Robots.

Motion Planning and RigidBodyTree Simulation of UR5e for Bin Picking Using manipulatorRRT Algorithm
Motion planning algorithm design workflow for a real-world bin picking application using UR5e cobot.

Gazebo Simulation of Semi-Structured Intelligent Bin Picking for UR5e Using YOLO and PCA-Based Object Detection
Detailed workflow for simulating intelligent bin picking using Universal Robots UR5e cobot in Gazebo.

Semi-Structured Intelligent Bin Picking for UR5e Using YOLO and PCA-Based Object Detection
Detailed workflow for simulating intelligent bin picking using Universal Robots UR5e cobot hardware.
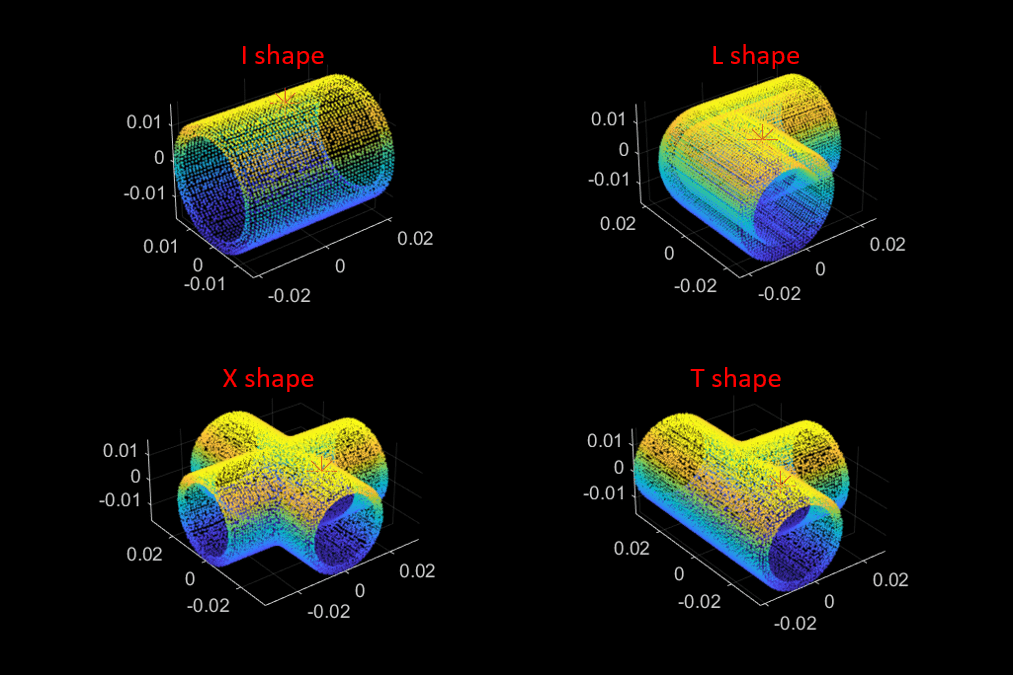
Pick Standard PVC Fittings of Different Shapes Using Semi-Structured Intelligent Bin Picking for UR5e
Implement semi-structured intelligent bin picking of four different shapes of standard PVC fittings using UR5e cobot.

Simulink Based Intelligent Bin Picking Using Universal Robots UR5e for PVC Fittings
Implement semi-structured intelligent bin picking of four different shapes of standard PVC fittings in Simulink®.
Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots using ROS 2
Move UR5 cobot using joint space control, task space control, and waypoint tracking in task space and joint space in ROS 2.