이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
phaseSpaceReconstruction
관측된 시계열을 상태 벡터로 변환
구문
설명
XR = phaseSpaceReconstruction(X,lag,dim)lag와 임베딩 차원 dim을 입력값으로 사용하여, 균일하게 샘플링된 시간 영역 신호 X의 재구성된 위상 공간 XR을 반환합니다.
phaseSpaceReconstruction을 사용하여 시스템 속성은 유지하면서 시스템 차수를 확인하고 모든 동적 시스템 변수를 재구성합니다. 위상 공간을 재구성하는 것은 사용 가능한 데이터가 제한되거나 위상 공간 차원 및 지연을 알 수 없는 경우 유용합니다. 비선형 특징 approximateEntropy, correlationDimension 및 lyapunovExponent는 계산의 첫 단계로 phaseSpaceReconstruction을 사용합니다.
[___] = phaseSpaceReconstruction(___,는 하나 이상의 Name,Value)Name,Value 쌍의 인수로 지정된 추가 옵션을 사용하여 재구성된 위상 공간 XR을 반환합니다.
phaseSpaceReconstruction(___)(출력 인수 없음)은 재구성된 위상 공간의 하위 좌표축으로 구성된 행렬을 만들고 대각선에 히스토그램 플롯을 놓습니다.
예제
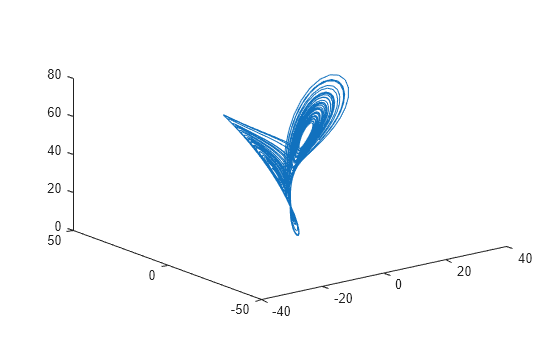
이 예제에서는 로렌츠 끌개(Lorenz Attractor)에 대한 측정값이 있다고 가정합니다. 측정값은 x 방향으로만 있는데, 끌개는 3차원 시스템입니다. 이 제한적인 데이터를 사용하여 원래 시스템의 속성이 유지되도록 위상 공간을 재구성합니다.
로렌츠 끌개 데이터를 불러오고 3차원 플롯에서 x, y, z 측정값을 시각화합니다.
load('lorenzAttractorExampleData.mat','data'); plot3(data(:,1),data(:,2),data(:,3));
x 방향 측정값을 사용하여 지연과 차원을 추정합니다.
xdata = data(:,1); [~,eLag,eDim] = phaseSpaceReconstruction(xdata)
eLag = 10
eDim = 3
로렌츠 끌개는 3차원의 데이터를 가지므로, 추정되는 임베딩 차원 eDim은 3입니다.
추정 지연값과 임베딩 차원을 사용하여 재구성된 위상 공간을 시각화합니다.
phaseSpaceReconstruction(xdata,eLag,eDim);

3x3 위상 공간 플롯에서 보다시피, 끌개의 토폴로지가 복원되었습니다. 과 은 추정 지연값 10을 사용하여 재구성된 다른 두 개의 상태입니다. 대각 플롯 (1,1), (2,2) 및 (3,3)은 각각 , 및 데이터의 히스토그램을 나타냅니다.
입력 인수
이름-값 인수
출력 인수
알고리즘
참고 문헌
[1] Rhodes, Carl & Morari, Manfred. "False Nearest Neighbors Algorithm and Noise Corrupted Time Series." Physical Review. E. 55.10.1103/PhysRevE.55.6162.
[2] Kliková, B., and Aleš Raidl. "Reconstruction of phase space of dynamical systems using method of time delay." Proceedings of the 20th Annual Conference of Doctoral Students WDS 2011.
[3] I. Vlachos, D. Kugiumtzis, "State Space Reconstruction for Multivariate Time Series Prediction", Nonlinear Phenomena in Complex Systems, Vol 11, No 2, pp 241-249, 2008.
[4] Kantz, H., and Schreiber, T. Nonlinear Time Series Analysis. Cambridge: Cambridge University Press, Vol. 7, 2004.
확장 기능
버전 내역
R2018a에 개발됨