interpolateVelocity
Interpolate velocity at arbitrary spatial locations for all time or frequency steps for dynamic structural problem
Syntax
Description
intrpVel = interpolateVelocity(structuralresults,xq,yq)xq and yq for all time or frequency
steps.
intrpVel = interpolateVelocity(structuralresults,querypoints)querypoints.
Examples
Interpolate velocity at the geometric center of a beam under a harmonic excitation.
Create and plot a beam geometry.
gm = multicuboid(0.06,0.005,0.01);
pdegplot(gm,FaceLabels="on",FaceAlpha=0.5)
view(50,20)
Create an femodel object for transient structural analysis and include the geometry into the model.
model = femodel(AnalysisType="structuralTransient", ... Geometry=gm);
Specify Young's modulus, Poisson's ratio, and the mass density of the material.
model.MaterialProperties = ... materialProperties(YoungsModulus=210E9, ... PoissonsRatio=0.3, ... MassDensity=7800);
Fix one end of the beam.
model.FaceBC(5) = faceBC(Constraint="fixed");Apply a sinusoidal displacement along the y-direction on the end opposite the fixed end of the beam.
yDisplacementFunc = ...
@(location,state) ones(size(location.y))*1E-4*sin(50*state.time);
model.FaceBC(3) = faceBC(YDisplacement=yDisplacementFunc);Generate a mesh.
model = generateMesh(model,Hmax=0.01);
Specify the zero initial displacement and velocity.
model.CellIC = cellIC(Displacement=[0;0;0],Velocity=[0;0;0]);
Solve the problem.
tlist = 0:0.002:0.2; R = solve(model,tlist);
Interpolate velocity at the geometric center of the beam.
coordsMidSpan = [0;0;0.005]; intrpVel = interpolateVelocity(R,coordsMidSpan);
Plot the y-component of velocity of the geometric center of the beam.
figure
plot(R.SolutionTimes,intrpVel.vy)
title("Y-Velocity of the Geometric Center of the Beam")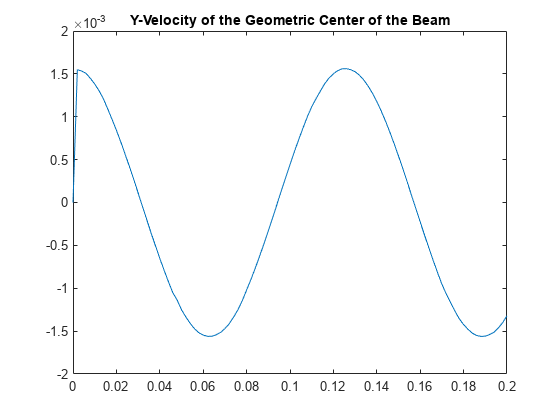
Input Arguments
Output Arguments
Version History
Introduced in R2018a