위치 센싱 서브시스템 만들기
위치 센싱 서브시스템은 Surface Mount PMSM 블록에서 모터 위치를 읽고 QEP 인코더 펄스 카운트를 시뮬레이션합니다. Surface Mount PMSM 블록은 모터의 기계적 위치를 rad/s 단위로 출력합니다.
이 그림에 표시된 대로 0~2π rad/s 범위의 위치를 QEP 인코더 카운트로 변환합니다.
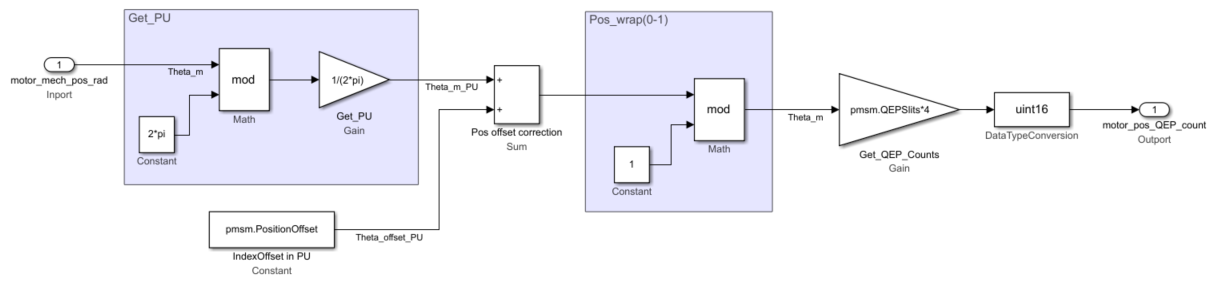
회전자 d축을 기준으로 한 QEP 인덱스 위치 오프셋 감지에 대한 자세한 내용은 Quadrature Encoder Offset Calibration for PMSM 항목을 참조하십시오.