bwtraceboundary
이진 영상에서 객체 추적
구문
설명
예제
영상을 읽어 들인 후 표시합니다.
BW = imread('blobs.png');
imshow(BW)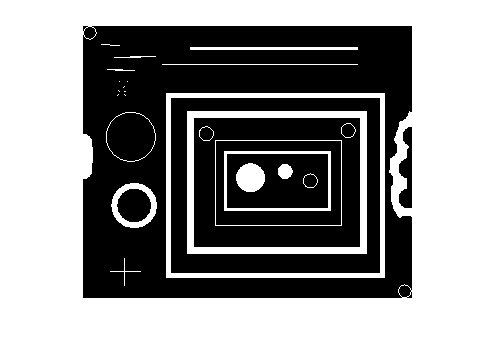
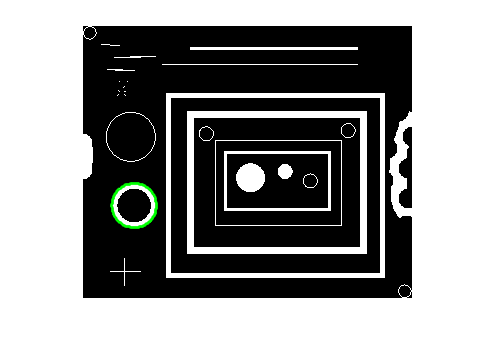
영상에서 객체를 선택하고 경계선을 추적합니다. 객체를 선택하려면 객체의 경계선에 있는 픽셀을 지정하십시오. 이 예제에서는 두꺼운 흰색 원의 경계선에 있는 픽셀 좌표를 사용합니다. 픽셀 좌표는 impixelinfo를 사용하는 외관 검사를 통해 얻을 수 있습니다. bwtraceboundary는 기본적으로 경계선에 있는 모든 픽셀을 식별합니다.
r1 = 163;
c1 = 37;
contour = bwtraceboundary(BW,[r1 c1],'W');영상에 윤곽선을 플로팅합니다.
hold on plot(contour(:,2),contour(:,1),'g','LineWidth',2)
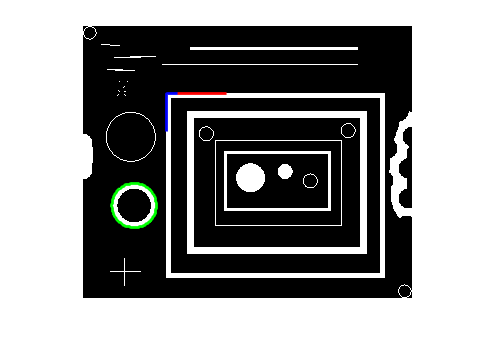
두 번째 객체의 경계선에 있는 점을 선택합니다. 이 예제에서는 가장 큰 사각형의 왼쪽 상단 코너 근처의 픽셀 좌표를 사용합니다. 시계 방향으로 첫 50개의 경계선 픽셀을 추적합니다.
r2 = 68; c2 = 95; contourCW = bwtraceboundary(BW,[r2 c2],'W',8,50,'clockwise');
두 번째 객체의 경계선에 있는 동일한 점에서 시작하여 시계 반대 방향으로 첫 50개의 경계선 픽셀을 추적합니다.
contourCCW = bwtraceboundary(BW,[r2 c2],'W',8,50,'counterclockwise');
영상에 빨간색으로 시계 방향 윤곽선을 플로팅합니다. 영상에 파란색으로 시계 반대 방향 윤곽선을 플로팅합니다.
plot(contourCW(:,2),contourCW(:,1),'r','LineWidth',2) plot(contourCCW(:,2),contourCCW(:,1),'b','LineWidth',2)
입력 인수
이진 영상으로, 2차원 숫자형 또는 논리형 행렬로 지정됩니다.
추적을 시작할 객체 경계선의 시작점 좌표로, 요소를 2개 가진 [row column] 형식의 벡터로 지정됩니다.
데이터형: double
픽셀 연결성으로, 8 또는 4로 지정됩니다.
값 | 의미 | |
|---|---|---|
2차원 연결성 | ||
| 경계가 서로 닿으면 픽셀이 연결됩니다. 픽셀의 이웃은 가로 또는 세로 방향으로 인접한 픽셀입니다. |
현재 픽셀은 회색으로 표시됩니다. |
| 경계 또는 코너가 서로 닿으면 픽셀이 연결됩니다. 픽셀의 이웃은 가로, 세로 또는 대각선 방향으로 인접한 픽셀입니다. |
현재 픽셀은 회색으로 표시됩니다. |


데이터형: double
추출할 최대 경계선 픽셀 수로, 양의 정수로 지정됩니다. 기본적으로 m은 Inf이고 bwtraceboundary는 경계선에 있는 모든 픽셀을 식별합니다.
데이터형: double
경계선을 추적할 방향으로, "clockwise" 또는 "counterclockwise"로 지정됩니다.
데이터형: char | string
출력 인수
알고리즘
bwtraceboundary 함수는 제이콥(Jacob)의 중지 조건에 의해 수정된 무어-이웃(Moore-Neighbor) 추적 알고리즘을 구현합니다. 이 함수는 Digital Image Processing Using MATLAB(저자: Gonzalez, R. C., R. E. Woods, S. L. Eddins)의 초판(New Jersey, Pearson Prentice Hall, 2004)에 나와 있는 boundaries 함수를 기반으로 합니다.
참고 문헌
[1] Gonzalez, R. C., R. E. Woods, and S. L. Eddins. Digital Image Processing Using MATLAB, New Jersey, Pearson Prentice Hall, 2004.