이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
ga
유전 알고리즘을 사용하여 함수의 최솟값 구하기
구문
설명
x = ga(fun,nvars)fun에 대한 제약 조건 없는 국소 최솟값 x를 구합니다. nvars는 fun의 차원(설계 변수 개수)입니다.
참고
추가 파라미터 전달하기에는 필요한 경우 추가 파라미터를 목적 함수와 비선형 제약 조건 함수에 전달하는 방법을 설명되어 있습니다.
예제
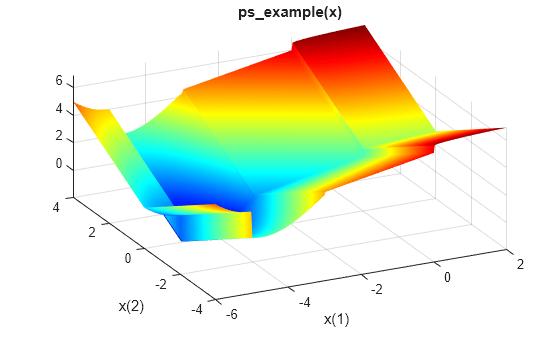
이 예제를 실행할 때 ps_example.m 파일이 포함됩니다. 이 함수를 플로팅합니다.
xi = linspace(-6,2,300); yi = linspace(-4,4,300); [X,Y] = meshgrid(xi,yi); Z = ps_example([X(:),Y(:)]); Z = reshape(Z,size(X)); surf(X,Y,Z,'MeshStyle','none') colormap 'jet' view(-26,43) xlabel('x(1)') ylabel('x(2)') title('ps\_example(x)')
ga를 사용하여 이 함수의 최솟값을 구합니다.
rng default % For reproducibility x = ga(@ps_example,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6793 -0.0860
유전 알고리즘을 사용하여 영역 x(1) + x(2) >= 1 및 x(2) <= 5 + x(1)에서 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 이 함수가 포함됩니다.
먼저 2개의 부등식 제약 조건을 행렬 형식 A*x <= b로 변환합니다. 즉, 부등식의 왼쪽에서 x 변수를 구하고, 2개의 부등식을 모두 작거나 같게 만듭니다.
-x(1) -x(2) <= -1
-x(1) + x(2) <= 5
A = [-1,-1;
-1,1];
b = [-1;5];ga를 사용하여 제약 조건이 있는 문제를 풉니다.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
0.9990 0.0000
제약 조건은 제약 조건 허용오차 1e-3의 디폴트 값 내에서 충족됩니다. 이를 확인하기 위해 A*x' - b를 계산해 보면 음수 성분이 있는 것을 알 수 있습니다.
disp(A*x' - b)
0.0010 -5.9990
유전 알고리즘을 사용하여 영역 x(1) + x(2) >= 1 및 x(2) == 5 + x(1)에서 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 이 함수가 포함됩니다.
먼저 2개의 제약 조건을 행렬 형식 A*x <= b 및 Aeq*x = beq로 변환합니다. 즉, 표현식의 왼쪽에서 x 변수를 구하고 부등식을 작거나 같다는 형식으로 만듭니다.
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
ga를 사용하여 제약 조건이 있는 문제를 풉니다.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-2.0005 2.9995
제약 조건이 ConstraintTolerance의 디폴트 값인 1e-3 내에서 충족되는지 확인합니다.
disp(A*x' - b)
1.0000e-03
disp(Aeq*x' - beq)
8.5897e-09
유전 알고리즘을 사용하여 영역 x(1) + x(2) >= 1 및 x(2) == 5 + x(1)에서 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 ps_example 함수가 포함됩니다. 또한 범위 1 <= x(1) <= 6 및 -3 <= x(2) <= 8을 설정합니다.
먼저 2개의 선형 제약 조건을 행렬 형식 A*x <= b 및 Aeq*x = beq로 변환합니다. 즉, 표현식의 왼쪽에서 x 변수를 구하고 부등식을 작거나 같다는 형식으로 만듭니다.
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
범위 lb와 ub를 설정합니다.
lb = [1 -3]; ub = [6 8];
ga를 사용하여 제약 조건이 있는 문제를 풉니다.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,lb,ub)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
1.0000 6.0000
선형 제약 조건이 ConstraintTolerance의 디폴트 값인 1e-3 내에서 충족되는지 확인합니다.
disp(A*x' - b)
-6.0000
disp(Aeq*x' - beq)
-7.9765e-08
유전 알고리즘을 사용하여 영역 및 에서 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 ps_example 함수가 포함됩니다.
이렇게 하려면 첫 번째 출력값인 c에서 부등식 제약 조건을 반환하고 두 번째 출력값인 ceq에서 등식 제약 조건을 반환하는 함수 ellipsecons.m을 사용합니다. 이 예제를 실행할 때 ellipsecons 함수가 포함됩니다. ellipsecons 코드를 검토합니다.
type ellipseconsfunction [c,ceq] = ellipsecons(x) c = 2*x(1)^2 + x(2)^2 - 3; ceq = (x(1)+1)^2 - (x(2)/2)^4;
함수 핸들을 nonlcon 인수로 ellipsecons에 포함합니다.
nonlcon = @ellipsecons; fun = @ps_example; rng default % For reproducibility x = ga(fun,2,[],[],[],[],[],[],nonlcon)
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
-0.9766 0.0362
비선형 제약 조건이 x에서 충족되는지 확인합니다. 제약 조건은 ConstraintTolerance의 디폴트 값인 1e-3 내에서 c≤0 및 ceq=0일 때 충족됩니다.
[c,ceq] = nonlcon(x)
c = -1.0911
ceq = 5.4645e-04
유전 알고리즘을 사용하여 디폴트 값보다 작은 제약 조건 허용오차로 영역 x(1) + x(2) >= 1 및 x(2) == 5 + x(1)에서 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 ps_example 함수가 포함됩니다.
먼저 2개의 제약 조건을 행렬 형식 A*x <= b 및 Aeq*x = beq로 변환합니다. 즉, 표현식의 왼쪽에서 x 변수를 구하고 부등식을 작거나 같다는 형식으로 만듭니다.
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
보다 정확한 해를 구하려면 제약 조건 허용오차를 1e-6으로 설정합니다. 그리고 솔버 진행률을 모니터링하기 위해 플롯 함수를 설정합니다.
options = optimoptions('ga','ConstraintTolerance',1e-6,'PlotFcn', @gaplotbestf);
최소화 문제를 풉니다.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,[],[],[],options)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.

x = 1×2
-2.0000 3.0000
선형 제약 조건이 1e-6 내에서 충족되는지 확인합니다.
disp(A*x' - b)
9.9809e-07
disp(Aeq*x' - beq)
-7.3589e-08
유전 알고리즘을 사용하여 x(1)이 정수라는 제약 조건을 적용하여 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 이 함수가 포함됩니다.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
유전 알고리즘을 사용하여 정수 제약 비선형 문제를 최소화합니다. 최솟값을 갖는 위치와 최소 함수 값을 모두 구합니다. 이 예제를 실행할 때 목적 함수 ps_example이 포함됩니다.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
이 결과를 제약 조건이 없는 문제와 비교합니다.
[x,fval] = ga(fun,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6906 -0.0078
fval = -1.9918
유전 알고리즘을 사용하여 x(1) 정수 값을 갖도록 제약하는 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 ps_example 함수가 포함됩니다. 솔버가 중지된 이유와 ga이 최솟값을 탐색하는 방법을 이해하려면 exitflag 및 output 결과를 가져옵니다. 또한, 솔버가 진행됨에 따라 관찰된 목적 함수 최솟값을 플로팅합니다.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; options = optimoptions('ga','PlotFcn', @gaplotbestf); [x,fval,exitflag,output] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)
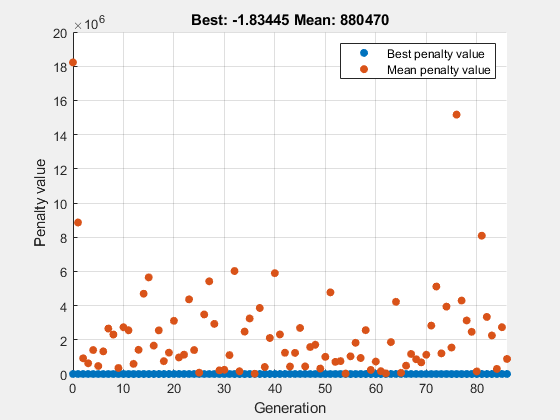
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
exitflag = 1
output = struct with fields:
problemtype: 'integerconstraints'
rngstate: [1×1 struct]
generations: 86
funccount: 3311
message: 'ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and ↵the constraint violation is less than options.ConstraintTolerance.'
maxconstraint: 0
hybridflag: []
유전 알고리즘을 사용하여 x(1) 정수 값을 갖도록 제약하는 ps_example 함수를 최소화합니다. 이 예제를 실행할 때 ps_example 함수가 포함됩니다. 최종 모집단과 점수 벡터를 포함한 모든 출력값을 가져옵니다.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval,exitflag,output,population,scores] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon);
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
최종 모집단의 처음 구성원 10개와 그에 대응하는 점수를 조사합니다. x(1)은 이러한 모든 모집단 구성원에 대해 정수 값입니다. 정수 ga 알고리즘은 실현 가능한 정수 모집단만 생성합니다.
disp(population(1:10,:))
1.0e+03 *
-0.0050 -0.0001
-0.0050 -0.0001
-1.6420 0.0027
-1.5070 0.0010
-0.4540 0.0104
-0.2530 -0.0011
-0.1210 -0.0003
-0.1040 0.1314
-0.0140 -0.0010
0.0160 -0.0002
disp(scores(1:10))
1.0e+06 *
-0.0000
-0.0000
2.6798
2.2560
0.2016
0.0615
0.0135
0.0099
0.0001
0.0000
입력 인수
출력 인수
세부 정보
팁
ga에서 호출할 수 있는 독립 변수에 추가 파라미터를 사용하여 함수를 작성하려면 추가 파라미터 전달하기 항목을 참조하십시오.모집단 유형
Double Vector(double형 벡터, 디폴트 값)를 사용하는 문제의 경우ga는 입력 유형이complex인 함수를 허용하지 않습니다. 복소수 데이터가 포함된 문제를 풀려면 실수부와 허수부를 분리하여 실수 벡터를 허용하도록 함수를 작성하십시오.
알고리즘
유전 알고리즘에 대한 설명은 How the Genetic Algorithm Works 항목을 참조하십시오.
정수 계획법 알고리즘에 대한 설명은 Integer ga Algorithm 항목을 참조하십시오.
제약 조건 유전 알고리즘에 대한 설명은 Nonlinear Constraint Solver Algorithms for Genetic Algorithm 항목을 참조하십시오.
대체 기능
앱
최적화 라이브 편집기 작업은 ga에 대한 시각적 인터페이스를 제공합니다.
참고 문헌
[1] Goldberg, David E., Genetic Algorithms in Search, Optimization & Machine Learning, Addison-Wesley, 1989.
[2] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds”, SIAM Journal on Numerical Analysis, Volume 28, Number 2, pages 545–572, 1991.
[3] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Barrier Algorithm for Optimization with General Inequality Constraints and Simple Bounds”, Mathematics of Computation, Volume 66, Number 217, pages 261–288, 1997.