이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
plotTrajectory
궤적 플로터에서 일련의 궤적 플로팅
설명
plotTrajectory(는 trajPlotter,trajCoordList)trajCoordList로 지정된 궤적을 궤적 플로터를 통해 시어터 플롯에 플로팅합니다.
예제
3개의 궤적에 대한 좌표를 정의합니다.
coordinates1 = [(1:10)' (2:11)' (11:-1:2)']; coordinates2 = coordinates1 + 1; coordinates3 = coordinates1 + 2;
theaterPlot 객체를 만들고 시야각을 설정하고 trajectoryPlotter 객체를 만듭니다.
tp = theaterPlot;
view(14,50)
trajPlotter = trajectoryPlotter(tp,DisplayName="Trajectories");3개의 궤적을 플로팅합니다.
plotTrajectory(trajPlotter,{coordinates1,coordinates2,coordinates3})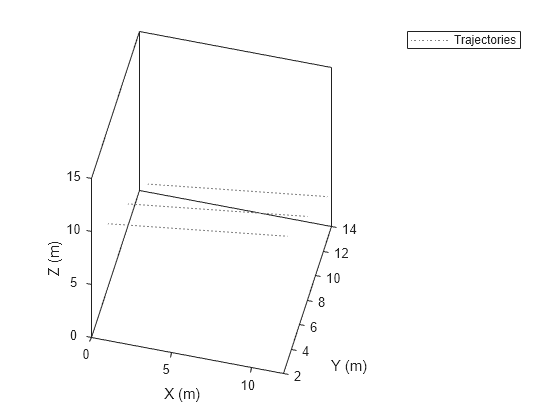
입력 인수
버전 내역
R2018b에 개발됨
참고 항목
trajectoryPlotter | theaterPlot | clearData | clearPlotterData