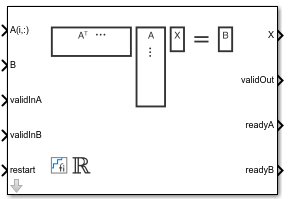
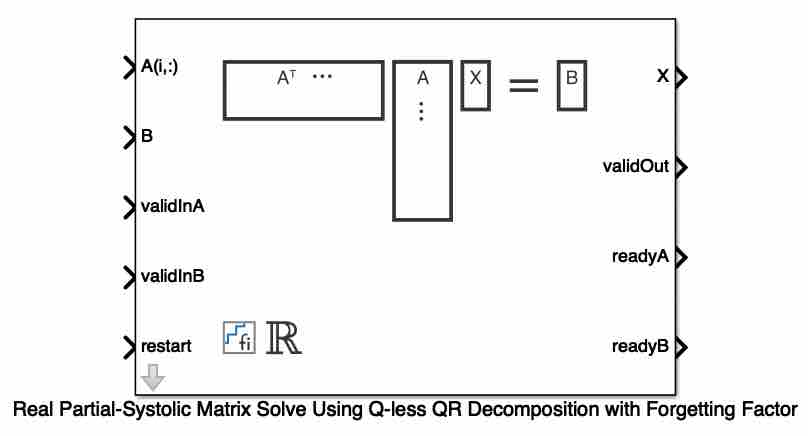
Real Partial-Systolic Matrix Solve Using Q-less QR Decomposition with Forgetting Factor
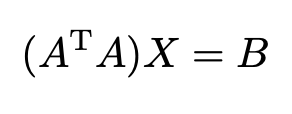
Compute value of X in the equation A'AX = B for real-valued matrices with infinite number of rows using Q-less QR decomposition
Libraries:
Fixed-Point Designer HDL Support /
Matrices and Linear Algebra /
Linear System Solvers
Description
The Real Partial-Systolic Matrix Solve Using Q-less QR Decomposition with Forgetting Factor block solves the system of linear equations A'AX = B using Q-less QR decomposition, where A and B are real-valued matrices. A is an infinitely tall matrix representing streaming data.
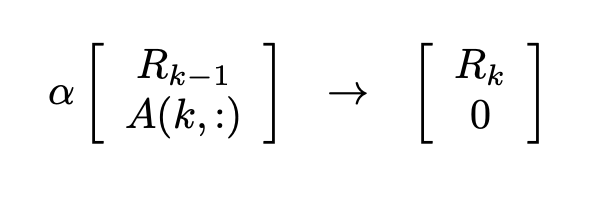
When the regularization parameter is nonzero, the Real Partial-Systolic Matrix
Solve Using Q-less QR Decomposition with Forgetting Factor initializes the first
upper-triangular factor R to λIn before factoring in the rows of A, where
λ is the regularization parameter and
In =
eye(n).
Examples
Implement Hardware-Efficient Real Partial-Systolic Matrix Solve Using Q-less QR Decomposition with Forgetting Factor
How to use the Real Partial-Systolic Matrix Solve Using Q-less QR Decomposition with Forgetting Factor block.

Algorithms to Determine Fixed-Point Types for Real Q-less QR Matrix Solve A'AX=B
Derivation of algorithms for determining fixed-point types for real Q-less QR matrix solve.
Determine Fixed-Point Types for Real Q-less QR Matrix Solve A'AX=B
Use fixed.realQlessQRFixedpointTypes to determine fixed-point types
for computation of the real least-squares matrix equation.
Compute Forgetting Factor Required for Streaming Input Data
Use fixed.forgettingFactor and
fixed.forgettingFactorInverse to compute forgetting factor.
Ports
Input
Output
Parameters
Tips
Use
fixed.forgettingFactorto compute the forgetting factor, α, for an infinite number of rows with the equivalent gain of a matrix with m rows.Use
fixed.forgettingFactorInverseto compute the number of rows, m, of a matrix with equivalent gain corresponding to forgetting factor α.
Algorithms
The Partial-Systolic Matrix Solve Using Q-less QR Decomposition with Forgetting Factor blocks accept matrix A row-by-row and matrix B as a single vector. After accepting the first valid pair of A and B matrices, the block outputs the X matrices row by row continuously.
For example, assume that the input A matrix is 3-by-3. Additionally
assume that validIn asserts before ready, meaning that
the upstream data source is faster than the QR decomposition.
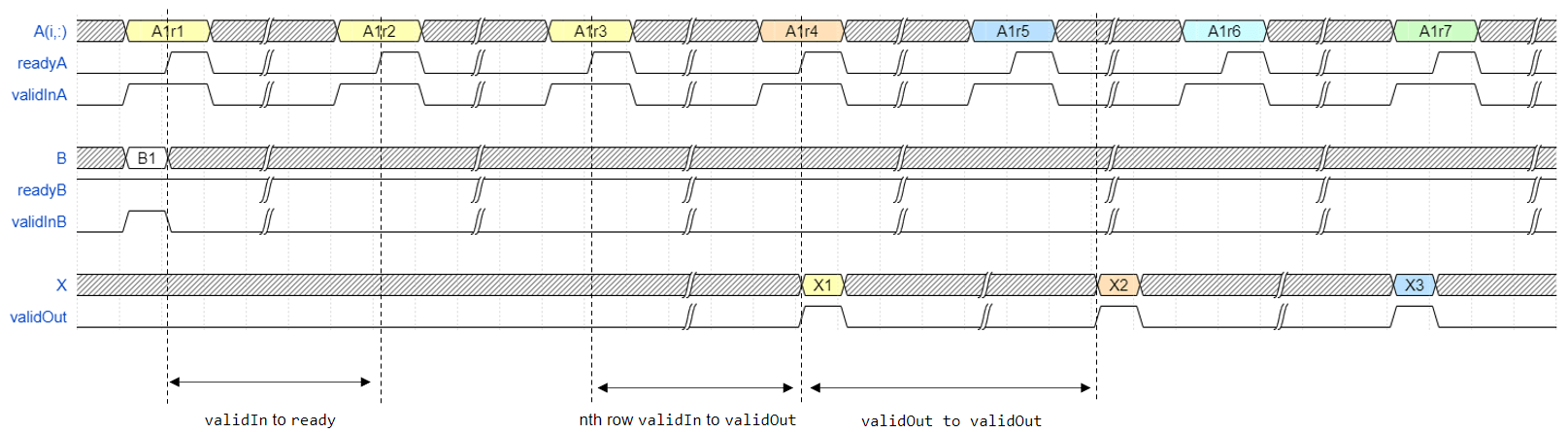
In the figure,
A1r1is the first row of the first A matrix,A1r2is the second row of the first A matrix, and so on.validIntoready— From a successful A row input to the block being ready to accept the next row.validOuttovalidOut— Because the Forward Backward Substitution block runs continuously, it generates output at a constant rate. This is the delay between two adjacent valid outputs.Last row
validIntovalidOut— From the last mth row input to the block starting to output the solution.This block is always ready to accept B matrices, so
readyBis always asserted.
The following table provides details of the timing for the Real Partial-Systolic Matrix Solve Using Q-less QR Decomposition with Forgetting Factor block. Latency depends on the size of matrix A and the data types of the A and B matrices. In the table:
n is the number of columns in matrix A.
wl represents the word length of the input data in matrix A.
| Input Data Type | validIn to ready (cycles) | validOut to validOut (cycles) | Last Row validIn to validOut
(cycles) |
|---|---|---|---|
Fixed point fi | wl + 7 | 4*n2 + 25*n + 5 + 2*n*wl + 2*n*nextpow2(wl) | 4*n2 + 25*n + 5 + 2*n*wl + 2*n*nextpow2(wl) + (wl + 6)*n + 2 |
Scaled double fi | wl + 7 | 4*n2 + 23*n + 5 + 2*n*wl | 4*n2 + 25*n + 5 + 2*n*wl + (wl + 4)*n + 2 |
double | 60 | 4*n2 + 21*n + 5 | 4*n2 + 80*n + 7 |
single | 31 | 4*n2 + 21*n + 5 | 4*n2 + 51*n + 7 |
References
[1] "AMBA AXI and ACE Protocol Specification Version E." https://developer.arm.com/documentation/ihi0022/e/