이 페이지는 기계 번역을 사용하여 번역되었습니다. 영어 원문을 보려면 여기를 클릭하십시오.
회전익 UAV에 대한 고장 모드 및 영향 분석 수행
이 예제는 무인 항공 시스템(UAS)의 아키텍처 모델에 결함을 주입하여 고장 모드 및 영향 분석(FMEA)을 통해 안전 속성을 검증하는 방법을 보여줍니다. 이 시스템은 회전익 무인 항공기(UAV)를 조종하는 하드웨어와 제어 장치를 모델링합니다. 이 예제에서는 수행할 분석의 범위를 결정하기 위해 안전성 분석 관리자 스프레드시트에서 사용자 지정 콜백을 사용합니다. 이 스프레드시트는 MATLAB® 함수와 Simulink® 시뮬레이션을 사용하여 결함으로 인한 고장 모드가 예측된 결과를 초래하는지 확인합니다.
파일을 다운로드하고 프로젝트를 엽니다
이 예제에서는 뮌헨 공과대학교(Technische Universität München) 소속 연구진이 생성하고 관리하는 공개 GitLab® 리포지토리에 있는 파일들을 사용합니다. EPUCOR FMEA 사례 연구를 참조하십시오. 파일 사본을 얻으려면 gitclone 함수를 사용하여 저장소를 복제하십시오.
gitclone("https://gitlab.com/tum-fsd/epucor-fmea-case-study");아키텍처 모델 검토
이 저장소는 프로젝트를 통해 파일 간의 종속성을 설정합니다. 아키텍처만 확인하고 시뮬레이션하려면, 리포지토리 파일이 들어 있는 폴더를 연 다음, 01_Architecture 폴더에 있는 EPC_Architecture 프로젝트를 여십시오.
cd epucor-fmea-case-study architecture_proj = openProject("01_Architecture/EPC_Architecture.prj");
구성을 확인하려면 EPC_Architecture 아키텍처 모델을 여십시오.
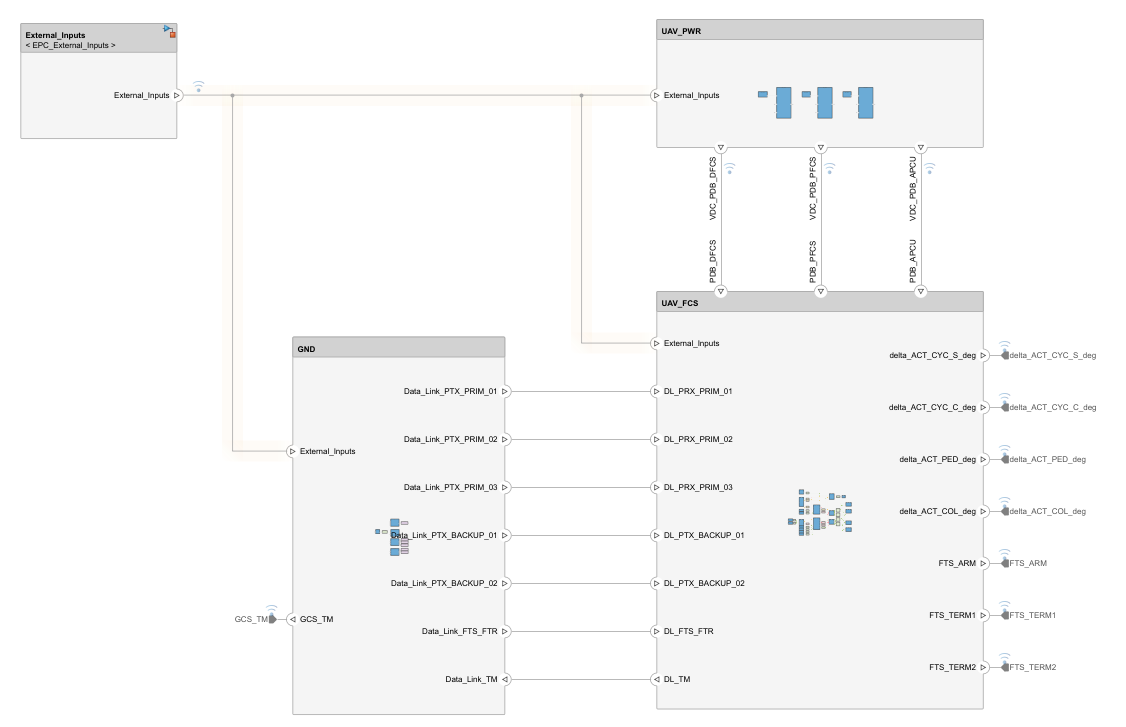
open_system("EPC_Architecture")이 아키텍처 모델은 실제 동축 회전익 UAV를 제어하는 하드웨어와 소프트웨어를 나타냅니다. 이 설계는 Hosseini 등([1])의 연구에서 설명된 내용을 참고한 것입니다. 이 아키텍처 모델은 네 가지 주요 아키텍처 컴포넌트를 포함하고 있습니다.
External_Inputs— UAV를 원격으로 제어하는 사용자 입력. 이 컴포넌트는 Signal Editor 블록을 사용하여 네 가지 시나리오 중 하나에 해당하는 신호를 출력합니다. 시나리오를 선택하려면External_Inputs컴포넌트를 열고, Signal Editor 블록을 더블 클릭한 다음, 활성 시나리오 속성의 값을 업데이트하십시오.UAV_FCS— UAV에 탑재된 전자 제어 장치, 센서, 액추에이터 및 디지털 통신 시스템으로, 비행 제어 시스템이라고도 합니다.UAV_PWR— 기내 비행 제어 시스템의 전원 공급 장치.GND— 지상의 제어 및 감시 장치로, 지상국이라고도 합니다.
시스템을 모델링하기 위해 UAV_PWR, UAV_FCS 및 GND 컴포넌트는 보호된 Referenced Component 블록을 사용합니다.
지상 모니터링 장치용 에뮬레이터 보기
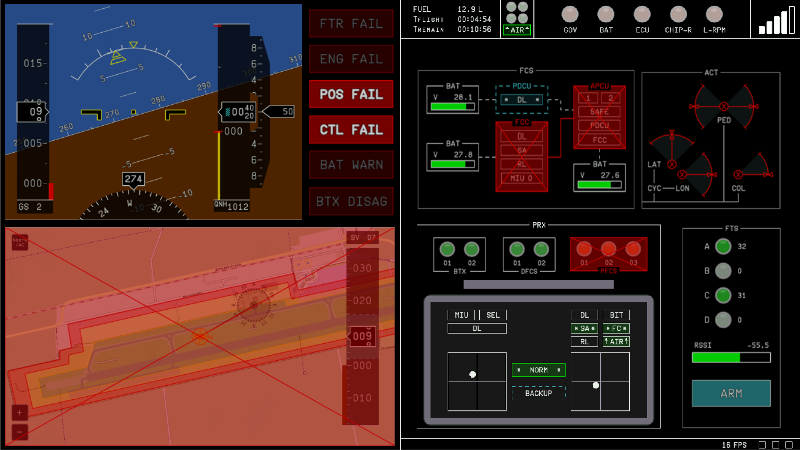
조종사들은 지상 관제소에서 UAV를 조종하고 그 상태를 확인합니다. 지상 관제소에서 수신한 상태를 표시하기 위해, 이 모델에는 지상 모니터링 장치로 알려진, 지상 관제소에 연결된 주 계기판의 에뮬레이터가 포함되어 있습니다. GND 컴포넌트에서 GMU 컴포넌트를 열어 에뮬레이터를 확인하십시오. 이 에뮬레이터는 지상 모니터링 장치를 일련의 이미지로 표현합니다.

모델이 장비 고장을 감지하면, 에뮬레이터는 해당 패널 아티팩트에 줄을 긋거나 아티팩트를 빨간색으로 표시하여 화면을 업데이트합니다. 물리적인 지상 모니터링 장치와 달리, 이 에뮬레이터는 다른 데이터를 표시하지 않습니다.
ETH interface 섹션의 블록들은 검출 로직 데이터를 받아 패널 이미지를 업데이트하도록 구성합니다. 로직을 확인하려면 RX_Wrapper 블록을 열어보십시오.
아키텍처의 기술적 세부 사항에 대해 더 자세히 알아보려면, Hosseini 등[1]이 발표한 연구 논문과 더불어 01_Architecture 폴더에 있는 ArchitectureDescription.mlx 라이브 스크립트를 참조하십시오.
결함 검사 및 시뮬레이션
결함을 확인하고 분석하려면 EPC_FMEA 프로젝트를 여십시오. EPC_FMEA 프로젝트는 모델에 결함을 추가하는 데 사용되는 종속성을 정의합니다. EPC_Architecture 프로젝트를 닫고, EPC_FMEA 프로젝트를 연 다음, EPC_Architecture 아키텍처 모델을 다시 엽니다.
close(architecture_proj); openProject("EPC_FMEA.prj"); open_system("EPC_Architecture")
결함 검사
결함을 확인하려면 결함 테이블 패널을 엽니다. 앱 탭에서 결함 분석기를 클릭합니다. 그런 다음 결함 분석기 탭의 View 섹션에서 결함 테이블을 클릭합니다. 이 아키텍처 모델에는 133개의 결함이 포함되어 있습니다.

결함을 확인하려면 각 모델 요소를 확장하십시오. 몇 가지 결함에는 관련 동작이 없습니다. 다른 결함들은 EPC_FaultLibrary 라이브러리에 정의된 동작을 사용합니다. 결함 라이브러리 속성에서 해당 라이브러리를 선택하면 이 라이브러리의 결함 동작을 결함에 추가할 수 있습니다. 사용자 지정 결함 동작을 생성, 저장 및 액세스하는 방법에 대한 자세한 내용은 라이브러리를 사용하여 결함 동작 사용자 지정를 참조하십시오.
결함을 찾으려면 검색 표시줄에 해당 결함이나 결함이 있는 모델 요소의 일부를 입력하십시오. 그런 다음, 해당 결함을 마우스 오른쪽 버튼으로 클릭하고 캔버스에 결함 모델 요소 표시를 선택합니다. 이 이미지는 FCC 참조 모델의 CAN_02 출력에 발생한 결함 위치를 보여줍니다.

결함 조합 시뮬레이션
시뮬레이션에서 원하는 수의 결함을 선택하여 시뮬레이션할 수 있습니다. 예를 들어, 비행 제어 컴퓨터(FCC)의 첫 번째 출력 포트에서 RS422_07_Loss 결함만 시뮬레이션하려면, 결함 테이블 패널에서 UAV_FCS/FCC/Outport/2 모델 요소를 활성화하고 다른 모델 요소들은 비활성화하십시오. RS422_07_Loss 결함이 모델 요소에 있는 유일한 결함이기 때문에, 모델 요소를 활성화하면 이 결함도 함께 활성화됩니다.
결함 시뮬레이션을 활성화합니다. 결함 분석기 탭에서 Fault Simulation을 클릭하여 상태를 on로 설정합니다. 모델을 시뮬레이션합니다. 지상 모니터링 장치 에뮬레이터는 해당 모델이 7건의 고장을 감지했음을 나타내며, 관련 컴포넌트를 빨간색으로 강조 표시합니다.
추가 시뮬레이션 정보를 보려면 시뮬레이션 데이터 인스펙터를 여십시오. 이 모델은 아키텍처 모델의 데이터와 활성 결함의 결함 주입 상태를 기록합니다.
FMEA 보기
이 저장소에는 Rhein 등 [2]이 개발한 FMEA와, 해당 FMEA의 특징 및 기능을 설명하는 라이브 스크립트 GettingStarted.mlx가 포함되어 있습니다. EPC_FMEA 프로젝트는 FMEA가 아키텍처 모델을 시뮬레이션하고 분석하는 데 사용하는 종속성을 정의합니다. FMEA를 표현하기 위해 이 프로젝트에는 네 개의 스프레드시트가 포함되어 있습니다. FMEA를 확인하려면 안전성 분석 관리자 및 EPC_FMEA 스프레드시트를 여십시오.
safetyAnalysisManager
safetyAnalysisMgr.openDocument("EPC_FMEA.mldatx");EPC_FMEA 스프레드시트를 열면 다음 보조 스프레드시트들도 함께 열립니다:
EPC_FMEA_SLE— 컴포넌트의 고장으로 인해 발생할 수 있는 시스템 차원의 영향. Component 열의 셀이 비어 있는 경우, 해당 영향은 그 바로 위에 있는 첫 번째 비어 있지 않은 컴포넌트와 연결됩니다.EPC_FMEA_TLE— 고장 모드로 인해 발생할 수 있는 광범위한 UAS 영향, 그 심각성 및 완화 전략.EPC_FMEA_Scenarios— 모델이 시뮬레이션할 수 있는 시나리오.EPC_FMEA스프레드시트는 이 스프레드시트를 사용하여 각 고장 모드에 대해 어떤 시나리오를 시뮬레이션할지 결정합니다.

EPC_FMEA 스프레드시트를 사용하여 고장 모드 및 영향을 분석하십시오. EPC_FMEA 스프레드시트에는 다음과 같은 열이 포함되어 있습니다:
| 열 레이블 | 설명 |
|---|---|
| 컴포넌트 | 결함 바로 하류에 위치한 피해 아키텍처 모델. |
| Failure Mode | 결함과 관련된 고장 모드 유형. |
| 설명 | 고장 모드에 대한 설명. |
| 확률 | 해당 고장 모드가 발생할 확률(정성적). 이 열은 셀 값을 PROBABLE 또는 IMPROBABLE로 제한합니다. |
| 정당화 사유 | 확률 평가의 근거. 같은 행에 있는 확률 열의 셀 값이 IMPROBABLE인 경우, 정당화 사유 열의 셀에 내용을 입력해야 합니다. |
| Scenario | 고장 모드가 발생하는 비행 시나리오. 비행 시나리오는 External_Inputs 컴포넌트에 정의된 시나리오와 일치합니다. |
| System Level Effect | 고장 모드가 시스템 수준에서 국소적으로 미치는 영향. |
| UAS Level Effect | 고장 모드가 UAS 전체에 미치는 영향. |
| Severity | 해당 고장 모드가 발생할 경우의 심각도. Severity 열은 셀의 값을 심각도 순서(낮은 순서부터 높은 순서)로 나열된 다음 다섯 가지 열거형 값 중 하나로 제한합니다:
|
| Mitigations | 해당 고장 모드가 발생할 경우 이를 완화하기 위해 활용할 수 있는 전략. 이러한 전략에는 UAV 운용자가 수행할 수 있는 공학적 예방 조치 및 개입 방안이 포함됩니다. 이 예시에서 각 고장 모드에는 최대 하나의 완화 전략만 존재합니다. |
콜백을 사용하여 스프레드시트 분석하기
이 스프레드시트를 실행하고 관리하기 위해 EPC_FMEA 스프레드시트는 사용자 지정 콜백을 사용합니다. 사용자 지정 콜백에 대한 자세한 내용은 사용자 지정 콜백 생성를 참조하십시오. 콜백을 보려면 EPC_FMEA 스프레드시트를 선택하십시오. 분석 섹션에서 콜백 편집을 클릭하십시오. 이 스프레드시트에는 네 가지 사용자 지정 콜백이 정의되어 있습니다:
CurrentSelectionOnly— 선택한 셀의 행에 대해 고장 모드 및 영향을 분석할지, 아니면 스프레드시트 전체를 분석할지 여부를 지정합니다. 이 콜백의 상태는 다른 콜백들에 영향을 미칩니다.UpdateReferences— 다른 분석을 실행하기 전에 스프레드시트의 값을 업데이트합니다.RunStaticAnalysis— 스프레드시트에 대해 정적 분석을 수행합니다.RunSimulation— 아키텍처 모델에 대한 시뮬레이션 기반 분석을 수행하고, 그 결과를 스프레드시트 내용과 대조하여 평가합니다.

콜백은 MATLAB 패키지에 정의된 외부 함수를 실행합니다. 이 함수들은 03_Tools/SafetyTools 폴더에서 찾을 수 있습니다.
이 콜백 함수들은 스프레드시트 내의 Requirements Toolbox™ 링크를 활용합니다. 안전성 분석 관리자 스프레드시트 아티팩트에 대한 링크를 생성하는 방법에 대한 자세한 내용은 Link Safety Analysis Manager Spreadsheet Cells and Rows to Linkable Items를 참조하십시오.
스프레드시트 업데이트하기
EPC_FMEA 스프레드시트에는 133가지 고장 모드가 포함되어 있습니다. 일부 콘텐츠를 채우기 위해 스프레드시트는 UpdateReferences 사용자 지정 콜백을 사용합니다. 콜백은 각 셀의 링크와 스프레드시트 문서 특성을 활용하여 관련 스프레드시트와 데이터를 식별합니다. 문서 특성이나 링크가 잘못 정의된 경우, 콜백에서 오류가 발생합니다. 지원 파일과 링크를 식별한 후, 콜백은 다음 열 셀들을 업데이트합니다:
Component — 이 셀들은
EPC_Architecture아키텍처 모델에 있는 연결된 모델 요소의 이름과 일치합니다. 각 셀은 하나의 모델 요소에만 연결되어야 합니다. 해당 셀이 비어 있는 경우, 이 행의 고장 모드는 그 바로 위에 있는 첫 번째 비어 있지 않은 컴포넌트와 연결됩니다.Failure Mode — 이 셀들은
EPC_Architecture아키텍처 모델에 있는 연결된 결함의 이름과 일치합니다. 각 셀은 하나의 결함에만 연결되어야 합니다.Scenario — 이 셀들은
EPC_FMEA_Scenarios스프레드시트의 Scenario 열에 있는 연결된 셀의 값과 일치합니다. Scenario 열의 셀에 링크가 두 개 이상 포함된 경우, 콜백은 링크된 셀 값들을 목록 형태로 채웁니다.System Level Effect — 이 셀들은
EPC_FMEA_SLE스프레드시트의 Effect 열에 있는 연결된 셀의 값과 일치합니다. Effect 열의 셀에 링크가 두 개 이상 포함된 경우, 콜백은 링크된 셀 값들을 목록 형태로 채웁니다.UAS Level Effect — 이 셀들은
EPC_FMEA_TLE스프레드시트의 Effect 열에 있는 연결된 셀의 값과 일치합니다. UAS Level Effect 열의 셀에 링크가 두 개 이상 포함된 경우, 콜백은 링크된 셀 값들을 목록 형태로 채웁니다.Severity — 이 셀들은
EPC_FMEA_TLE스프레드시트의 Effect 열에 있는 연결된 값과 같은 행에 위치한 Severity 열의 셀 값과 일치합니다. UAS Level Effect 열의 셀에 링크가 두 개 이상 포함된 경우, 스프레드시트 셀은 링크된 영향 중 가장 심각한 수준을 적용합니다.Mitigations — 이 셀들은
EPC_FMEA_TLE스프레드시트의 Effect 열에 있는 연결된 값과 같은 행에 위치한 Mitigations 열의 셀 값과 일치합니다.
설명, 확률 및 정당화 사유 열의 셀 값은 수동으로 정의합니다.
스프레드시트의 내용을 업데이트하려면 분석 섹션에서 콜백 편집을 클릭한 다음 UpdateReferences를 선택하십시오. ‘콜백 편집기’ 창을 닫고 Analyze Spreadsheet를 클릭합니다. CurrentSelectionOnly 콜백을 활성화한 상태에서 UpdateReferences 콜백을 실행하면, 선택된 셀이 포함된 행만 업데이트됩니다. 예를 들어, 이미지의 선택 영역을 사용하여 콜백을 실행하면 첫 번째, 세 번째, 네 번째 행만 업데이트됩니다.

팁
이 예제 이외의 스프레드시트에서 참조를 생성하려면, 도출 열에서 참조를 정의하여 생성하십시오. 도출 열 참조는 콜백을 사용하지 않습니다. 안전성 분석 관리자 스프레드시트의 참조에 대한 자세한 내용은 Create References in Derived Column Cells를 참조하십시오.
정적 분석 실행
스프레드시트의 무결성을 확인하려면 RunStaticAnalysis 사용자 지정 콜백을 실행하십시오. 이 콜백은 스프레드시트에서 다음 요구 사항을 확인합니다:
어떤 고장 모드도 Severity 열에
CAT값을 가질 수 없습니다.고장 모드의 확률 열에
PROBABLE값이 있는 경우, 해당 고장 모드의 Severity 열에MAJ보다 심각한 값이 있어서는 안 됩니다.고장 모드의 확률 열에
PROBABLE값이 있고, Severity 열의 값이MAJ이상인 경우, 해당 고장 모드에는 Mitigation 열에 값이 반드시 있어야 합니다.고장 모드의 확률 열에
IMPROBABLE값이 있는 경우, 해당 고장 모드의 정당화 사유 열에는 반드시 값이 정의되어 있어야 합니다.고장 모드의 Component 열에 값이 있는 경우, 해당 셀은
EPC_Architecture모델 내의 모델 요소와 연결되어야 합니다.Failure Mode 열의 각 셀은
EPC_Architecture모델의 결함과 연결되어야 합니다.각 고장 모드에 대해 Failure Mode, 설명, Scenario, System Level Effect 및 UAS Level Effect 열의 셀에는 내용이 반드시 포함되어야 합니다.
분석이 완료되면, 콜백 함수는 스프레드시트에 고장 모드의 준수 여부 또는 문제점을 나타내는 플래그를 추가합니다.
예를 들어, 첫 번째 행에 대해 정적 분석을 수행하려면:
첫 번째 행의 각 셀에서 적어도 하나씩 선택하십시오.
Analyze Spreadsheet를 확장하고,
CurrentSelectionOnly및RunStaticAnalysis콜백을 선택한 다음,UpdateReferences및RunSimulation콜백을 해제하십시오.스프레드시트 분석을 클릭하십시오.
이 콜백은 확률 열의 셀에 확인 플래그를 추가합니다. 플래그를 가리키면 플래그에 대한 설명을 볼 수 있습니다.

여러 가지 고장 모드를 분석하거나 스프레드시트 전체를 분석할 수 있습니다. 고장 모드가 요구 사항을 충족하지 않는 사례를 확인하려면 113 행을 분석하십시오. 이 스프레드시트는 확률 열의 셀에 라는 오류 플래그를 추가합니다.
시뮬레이션 기반 분석 실행
RunSimulation 콜백을 활성화하면 스프레드시트에서 시뮬레이션 기반 분석을 실행할 수 있습니다. 이 콜백은 사용자가 선택한 각 고장 모드에 대해 시뮬레이션을 실행한 다음, 그 결과를 예상 결과와 비교합니다. 시뮬레이션하는 각 고장 모드에 대해, 콜백은 시뮬레이션을 다음과 같은 상황과 평가 기준에 맞게 구성합니다:
이 시뮬레이션은 연결된 결함만 주입하고, 나머지는 비활성화합니다.
이 모델은 연결된 시나리오를 선택하여 각각에 대해 시뮬레이션을 수행합니다.
시뮬레이션이 완료되면, 모델은
EPC_FMEA_SLE스프레드시트의 Effect Observer 열에 나열된 함수를 실행하여 각 영향을 평가합니다. 콜백은 System Level Effect 열에 연결된 셀을 기반으로 이 함수를 식별합니다. System Level Effect 열의 셀이 두 개 이상의 이펙트에 연결되어 있는 경우, 콜백은 각 이펙트에 대해 관련 함수를 실행합니다. 이 함수들은02_Safety/Effects폴더에서 찾을 수 있습니다.콜백은 모델의 로깅된 결과를 함수의 평가 결과와 비교합니다. 평가 결과와 기록된 결과가 일치하지 않으면, 스프레드시트는 해당 모델에 라는 경고 표시를 추가합니다.
예를 들어, 52번째 및 53번째 고장 모드를 시뮬레이션하고 그 영향을 확인하려면:
각 행에서 적어도 하나의 셀을 선택하십시오.
Analyze Spreadsheet를 확장하고,
CurrentSelectionOnly및RunSimulation콜백을 선택한 다음,UpdateReferences및RunStaticAnalysis콜백을 해제하십시오.스프레드시트 분석을 클릭하십시오.
이 콜백은 System Level Effect 열의 셀에 확인 플래그를 추가하며, 이는 함수를 통해 계산된 예상 영향을 각 고장 모드에 대해 모델에서 관측된 영향와 일치함을 나타냅니다. 플래그를 가리키면 플래그에 대한 설명을 볼 수 있습니다.

결함 및 모델 요소를 스프레드시트에 동기화
EPC_FMEA 스프레드시트에서, 모델을 저장할 때 PreSaveFcn 콜백이 컴포넌트 및 고장 모드 목록을 업데이트합니다. 스프레드시트를 저장하면, 스프레드시트를 동기화할지 묻는 메시지가 표시됩니다. 동기화를 수행하면, 콜백은 저장하기 전에 기존 컴포넌트와 결함만 포함하도록 스프레드시트를 업데이트합니다.
예를 들어, 모델에 결함을 추가하고 스프레드시트를 저장하면, 스프레드시트는 해당 결함을 추가하고 새로운 행에 새로운 고장 모드로 연결해 줍니다. 이 스프레드시트는 고장 모드 열의 셀에 경고 플래그를 추가합니다. 이 이미지는 PRX_DFCS_01 컴포넌트의 출력 포트에 결함을 추가하고 스프레드시트를 동기화한 후의 화면을 보여줍니다.
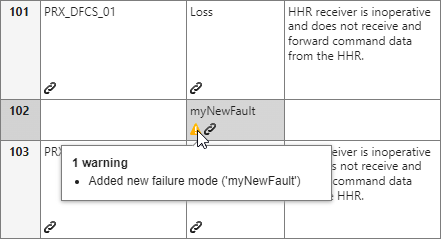
이 고장 모드에 대한 분석을 수행하려면 System Level Effect 및 UAS Level Effect 열 셀에 필요한 링크를 추가하고 UpdateReferences 콜백을 실행해야 합니다.
Disclaimer and Data Reuse License
The images in this example were captured by using a copy of the repository. In addition to the referenced studies, the text on this page is informed by content in the ArchitectureDescription.mlx and GettingStarted.mlx live scripts in the repository, and are used with permission from the authors. The images and the text presented in this example are approved by the authors.
Data Reuse License
This license applies to the files in the repository that you download in this example.
Copyright 2024, Institute of Flight System Dynamics, Technische Universität München
Redistribution and use of this data set, with or without modification, are permitted provided that the following conditions are met:
Redistribution in any form must retain the above copyright notice, this list of conditions and the following disclaimer.
Redistribution and use in any form must be accompanied by the following acknowledgement:
This product uses models, software and FMEA tables provided by courtesy of the Institute of Flight System Dynamics (https://www.fsd.ed.tum.de/), Technische Universität München. They were developed as part of a case study on simulation-driven safety assessment that was performed during the EPUCOR project, with significant contributions from the following individuals: Julian Rhein (julian.rhein@tum.de), Barzin Hosseini (barzin.hosseini@tum.de), Hannes Hofsäß (hannes.hofsaess@tum.de), Franz Sax (franz.sax@tum.de). This work was partially funded by the federal government of Germany as part of the LuFo program (funding ID: 20Y1705C). The main case study on simulation-driven safety assessment that led to development of the dataset is published in [2], other work that contributed to the case study is published in [1], [3].
THIS DATASET IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS DATASET, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
참고 문헌
[1] Hosseini, Seyedbarzin, Julian Rhein, Franz Sax, Hannes Hofsäß, Florian Holzapfel, Lukas Maier, Aaron Barth, and Benedikt Grebing. “Conversion of a Coaxial Rotorcraft to a UAV.” In AIAA SCITECH 2024 Forum. Orlando, FL: American Institute of Aeronautics and Astronautics, 2024. https://doi.org/10.2514/6.2024-1716.
[2] Rhein, Julian, Marco Bimbi, Giovanni Miraglia, and Florian Holzapfel. “Simulation-Driven Failure Modes and Effects Analysis of Flight Control System Architectures.” In 2024 AIAA DATC/IEEE 43rd Digital Avionics Systems Conference (DASC), 1–10, 2024. https://doi.org/10.1109/DASC62030.2024.10749685.
[3] Hofsäß, Hannes, Barzin Hosseini, Julian Rhein, and Florian Holzapfel. “On the Design and Model-Based Validation of Flight Control System Automation for an Unmanned Coaxial Helicopter,” 150–68. Gesellschaft für Informatik e.V., 2023. https://dl.gi.de/handle/20.500.12116/40201.