LMS Update
Estimate weights of least mean squares (LMS) adaptive filter
Libraries:
DSP System Toolbox /
Filtering /
Adaptive Filters
Description
The LMS Update block estimates the weights of an least mean squares (LMS) adaptive filter. Specify data and error as inputs and the block computes the filter weights based on the algorithm specified in the Algorithm parameter. For more details on the algorithms, see Algorithms.
You can configure the block to operate as a tapped-delay line FIR filter or as an adaptive linear combiner using the Adaptive filter mode parameter. The block can also adapt multiple filters independently when you specify the Number of adaptive filters parameter to a value greater than 1.
You can use this block to compute the adaptive filter weights in applications such as system identification, inverse modeling, and filtered-x LMS algorithms, which are used in acoustic noise cancellation. For more details, see References.
Examples

Active Noise Control with Simulink Real-Time
Design a real-time active noise control system using a Speedgoat® Simulink® Real-Time™ target.

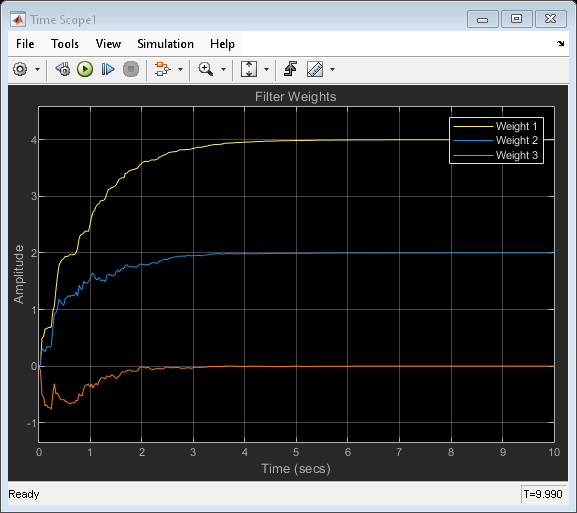
Adapt Multiple Filters Using LMS Update Block
Adapt multiple filters independently using the same LMS Update block. Use the Adapt port of the LMS Update block to selectively enable or disable the filters from being adapted.
Model Adaptive Linear Combiner using LMS Update Block
Use LMS Update block as an adaptive linear combiner.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Algorithms
References
[1] Madisetti, Vijay, and Douglas Williams. "Introduction to Adaptive Filters." The Digital Signal Processing Handbook. Boca Raton, FL: CRC Press, 1999.
[2] Akhtar, M. T., M. Abe, M. Kawamata. "Modified-filtered-x LMS algorithm based active noise control systems with improved online secondary-path modeling." IEEE Symposium on Circuits and Systems, 2004.
[3] Orfanidis, Sophocles J. Optimum Signal Processing. An Introduction. 2nd Ed. Englewood Cliffs, NJ: Prentice-Hall, 1996.