이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
filter
1차원 디지털 필터
설명
y = filter(b,a,x)b와 a로 정의되는 유리 전달 함수(Rational Transfer Function)를 사용하여 입력 데이터 x를 필터링합니다.
a(1)이 1과 일치하지 않으면 filter는 a(1)로 필터 계수를 정규화합니다. 따라서 a(1)은 0이 아니어야 합니다.
x가 벡터인 경우filter는 필터링된 데이터를x와 동일한 크기의 벡터로 반환합니다.x가 행렬인 경우filter는 첫 번째 차원에 적용되어 각 열에 대해 필터링된 데이터를 반환합니다.x가 다차원 배열인 경우filter는 크기가 1이 아닌 첫 번째 배열 차원을 따라 동작을 수행합니다.
예제
이동평균 필터
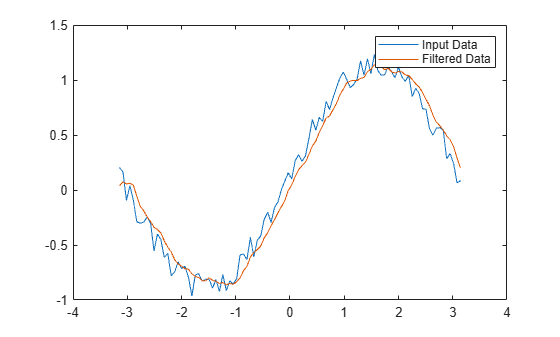
이동평균 필터는 잡음이 있는 데이터의 평활화에 사용되는 일반적인 방법입니다. 이 예제에서는 filter 함수를 사용하여 데이터의 벡터를 따라 평균을 계산합니다.
랜덤 잡음으로 손상되는 정현파 데이터로 구성된 1×100 행 벡터를 생성합니다.
t = linspace(-pi,pi,100); rng default %initialize random number generator x = sin(t) + 0.25*rand(size(t));
이동평균 필터는 데이터를 따라 길이가 인 윈도우만큼 이동하며 각 윈도우에 포함된 데이터의 평균을 계산합니다. 다음 차분 방정식은 벡터 의 이동평균 필터를 정의합니다.
간격 크기 5에 대해, 유리 전달 함수의 분자 및 분모 계수를 계산합니다.
windowSize = 5; b = (1/windowSize)*ones(1,windowSize); a = 1;
데이터의 이동평균을 구한 다음 원래 데이터와 함께 플로팅합니다.
y = filter(b,a,x); plot(t,x) hold on plot(t,y) legend('Input Data','Filtered Data')
행렬 행 필터링하기
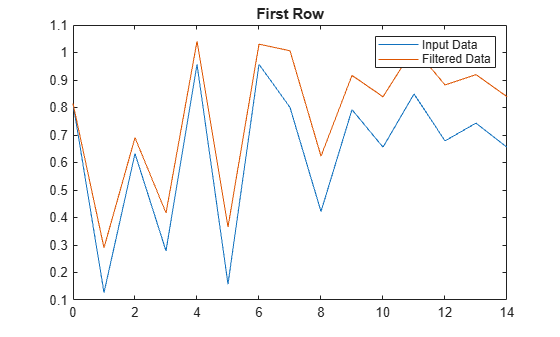
이 예제에서는 다음 유리 전달 함수를 사용하여 데이터 행렬을 필터링합니다.
임의의 입력 데이터로 구성된 2×15 행렬을 만듭니다.
rng default %initialize random number generator x = rand(2,15);
유리 전달 함수에 대해 분자 및 분모 계수를 정의합니다.
b = 1; a = [1 -0.2];
x의 두 번째 차원을 따라 전달 함수를 적용하고 각 행의 1차원 디지털 필터를 반환합니다. 원래 데이터의 첫 번째 행과 필터링된 데이터를 함께 플로팅합니다.
y = filter(b,a,x,[],2); t = 0:length(x)-1; %index vector plot(t,x(1,:)) hold on plot(t,y(1,:)) legend('Input Data','Filtered Data') title('First Row')
입력 데이터의 두 번째 행과 필터링된 데이터를 함께 플로팅합니다.
figure plot(t,x(2,:)) hold on plot(t,y(2,:)) legend('Input Data','Filtered Data') title('Second Row')

섹션의 데이터 필터링
특히 메모리 제한을 고려해야 한다면, 필터 지연에 대한 초기 및 최종 조건을 사용하여 섹션의 데이터를 필터링합니다.
큰 랜덤 데이터 시퀀스를 생성하여 2개의 세그먼트 x1과 x2로 분할합니다.
x = randn(10000,1); x1 = x(1:5000); x2 = x(5001:end);
전체 시퀀스 x는 x1과 x2의 세로 결합입니다.
유리 전달 함수에 대해 분자 및 분모 계수를 정의합니다.
b = [2,3]; a = [1,0.2];
부분 시퀀스 x1과 x2를 한 번에 하나씩 필터링합니다. x1 필터링에서 최종 조건을 출력하여 필터의 내부 상태를 첫 번째 세그먼트의 끝에 저장합니다.
[y1,zf] = filter(b,a,x1);
x1 필터링의 최종 조건을 초기 조건으로 사용하여 두 번째 세그먼트 x2를 필터링합니다.
y2 = filter(b,a,x2,zf);
y1은 x1에서 필터링된 데이터이고 y2는 x2에서 필터링된 데이터입니다. 필터링된 전체 시퀀스는 y1과 y2의 세로 결합입니다.
비교를 위해 전체 시퀀스를 동시에 필터링합니다.
y = filter(b,a,x); isequal(y,[y1;y2])
ans = logical
1
입력 인수
b — 유리 전달 함수의 분자 계수
벡터
유리 전달 함수의 분자 계수로, 벡터로 지정됩니다.
데이터형: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
복소수 지원 여부: 예
a — 유리 전달 함수의 분모 계수
벡터
유리 전달 함수의 분모 계수로, 벡터로 지정됩니다.
데이터형: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
복소수 지원 여부: 예
x — 입력 데이터
벡터 | 행렬 | 다차원 배열
입력 데이터로, 벡터, 행렬, 다차원 배열 중 하나로 지정됩니다.
데이터형: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
복소수 지원 여부: 예
zi — 필터 지연의 초기 조건
[] (디폴트 값) | 벡터 | 행렬 | 다차원 배열
필터 지연의 초기 조건으로, 벡터, 행렬, 다차원 배열 중 하나로 지정됩니다.
zi가 벡터인 경우 길이는max(length(a),length(b))-1이어야 합니다.zi가 행렬이나 다차원 배열이면 선행 차원의 크기는max(length(a),length(b))-1이어야 합니다. 각각의 나머지 차원의 크기는x의 대응하는 차원의 크기와 일치해야 합니다. 예를 들어, 3×4×5 배열x의 두 번째 차원(dim = 2)에 대해filter를 사용한다고 가정합니다. 배열zi의 크기는 [max(length(a),length(b))-1]×3×5여야 합니다.
[]로 지정되는 디폴트 값은 모든 필터 지연을 0으로 초기화합니다.
데이터형: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
복소수 지원 여부: 예
dim — 연산을 수행할 차원
양의 정수 스칼라
연산을 수행할 차원으로, 양의 정수 스칼라로 지정됩니다. 차원을 지정하지 않을 경우 디폴트 값은 크기가 1보다 큰 첫 번째 배열 차원이 됩니다.
2차원 입력 배열 x가 있다고 가정하겠습니다.
dim = 1인 경우filter(b,a,x,zi,1)은x의 열을 따라 연산을 수행하고 각 행에 적용된 필터를 반환합니다.
dim = 2인 경우filter(b,a,x,zi,2)는x의 행을 따라 연산을 수행하고 각 행에 적용된 필터를 반환합니다.
dim이 ndims(x)보다 큰 경우 filter는 x를 반환합니다.
데이터형: double | single | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
출력 인수
세부 정보
유리 전달 함수
Z 변환 도메인의 벡터에서 filter 연산의 입력-출력 설명은 유리 전달 함수입니다. 유리 전달 함수는 다음 형식을 사용합니다.
여기서는 FIR 필터와 IIR 필터가 모두 처리됩니다[1]. na는 피드백 필터 차수이고 nb는 피드포워드 필터 차수입니다. 정규화로 인해 a(1) = 1로 간주됩니다.
유리 전달 함수는 다음의 차분 방정식으로 표현할 수도 있습니다.
또한 다음 도식에서와 같이 DFIIt(Direct Form II Transposed) 구현 방식을 사용하여 유리 전달 함수를 표현할 수 있습니다. 여기서 na = nb = n-1입니다.

샘플 m에서 filter의 연산은 다음과 같은 시간 영역 차분 방정식으로 주어집니다.
팁
filter함수를 FIR 필터의b계수와 함께 사용하려면y = filter(b,1,x)를 사용하십시오.Signal Processing Toolbox™가 있는 경우,
y = filter(d,x)를 사용하여digitalFilter(Signal Processing Toolbox) 객체d로 입력 신호x를 필터링하십시오. 주파수 응답 사양에 따라d를 생성하려면designfilt(Signal Processing Toolbox)를 사용하십시오.필터링 함수에 대한 자세한 내용은 디지털 필터링 (Signal Processing Toolbox)을 참조하십시오.
참고 문헌
[1] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1999.
확장 기능
버전 내역
R2006a 이전에 개발됨
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)