이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
시나리오 생성
자율주행 응용 분야에서 시나리오 생성은 GPS(위성 측위 시스템), IMU(관성 측정 장치), 카메라, 라이다 센서에서 기록된 실제 차량 데이터로부터 가상 시나리오를 작성하는 프로세스입니다. Automated Driving Toolbox™는 시나리오 생성 프로세스를 자동화하는 함수와 툴을 제공합니다. 센서 데이터를 전처리하고, 도로를 추출하고, 액터의 위치를 추정하고, 액터 궤적을 구하여 실세계 시나리오를 정확히 반영한 디지털 트윈을 만들 수 있습니다. 생성된 시나리오를 시뮬레이션하고 자율주행 알고리즘을 실제 데이터와 비교하여 테스트합니다.
기록된 센서 데이터에서 시나리오를 생성하려면 애드온 탐색기에서 Scenario Builder for Automated Driving Toolbox 지원 패키지를 다운로드하십시오. 애드온 다운로드에 대한 자세한 내용은 애드온을 받고 관리하기 항목을 참조하십시오.
함수
도움말 항목
시작하기
- Overview of Scenario Generation from Recorded Sensor Data
Learn the basics of generating scenarios from recorded sensor data. - Coordinate Systems for Scenario Generation
Learn the coordinate system used in Scenario Builder for Automated Driving Toolbox support package workflows. - Optional Set Up for Scenario Generation
Learn how to download and install optional third-party software for Scenario Builder for Automated Driving Toolbox support package. - Extract Key Scenario Events from Recorded Sensor Data
Extract key scenario events from recorded sensor data.
장면 생성
- Generate RoadRunner Scene Using Processed Camera Data and GPS Data
Generate RoadRunner scene using labeled camera images and GPS data. - Generate RoadRunner Scene from Recorded Lidar Data
Generate RoadRunner HD map from recorded lidar data using pretrained deep learning model. - Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data. - Generate RoadRunner Scene with Traffic Signs Using Recorded Sensor Data
Generate RoadRunner scene with traffic signs using recorded sensor data. - Generate RoadRunner Scene Using Aerial Lidar Data
Generate RoadRunner scene from aerial lidar data. - Generate RoadRunner Scene Using Aerial Hyperspectral and Lidar Data
Generate RoadRunner scene from aerial hyperspectral and lidar data. - Georeference Sequence of Point Clouds for Scene Generation
Georeference sequence of point clouds for scene generation. - Transform Aerial Point Cloud for Scene Generation
Georeference aerial point cloud for scene generation.
시나리오 생성
- Ego Vehicle Localization Using GPS and IMU Fusion for Scenario Generation
Localize ego vehicle by fusing GPS and IMU sensor data to generate virtual driving scenario. - Preprocess Lane Detections for Scenario Generation
Format lane detection data to update lane specifications for scenario generation. - Smooth GPS Waypoints for Ego Localization
Create jitter-limited ego trajectory by smoothing GPS and IMU sensor data. - Generate Scenario from Actor Track Data and GPS Data
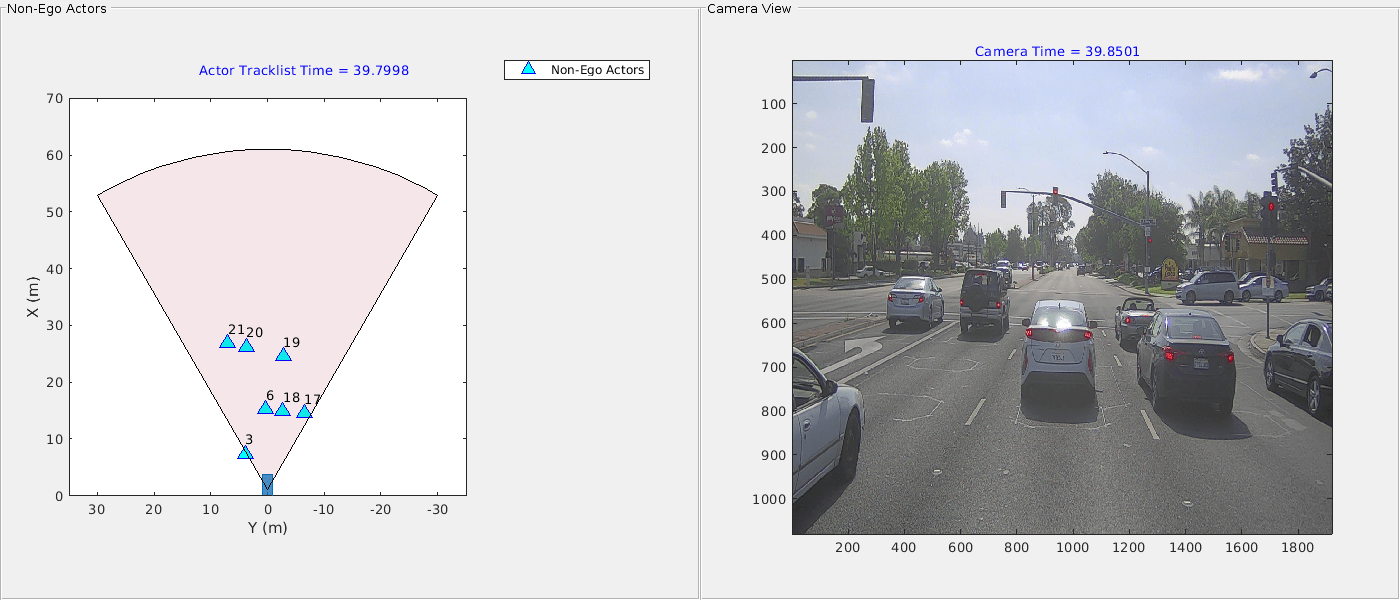
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data. - Extract Vehicle Track List from Recorded Camera Data for Scenario Generation
Extract actor track list from raw camera data for scenario generation. - Extract 3D Vehicle Information from Recorded Monocular Camera Data for Scenario Generation
Extract 3D vehicle information from recorded monocular camera data for scenario generation. - Synchronize GPS, Camera, and Actor Track Data for Scenario Generation
Synchronize multiple recorded sensor data for scenario generation. (R2025a 이후)
추천 예제
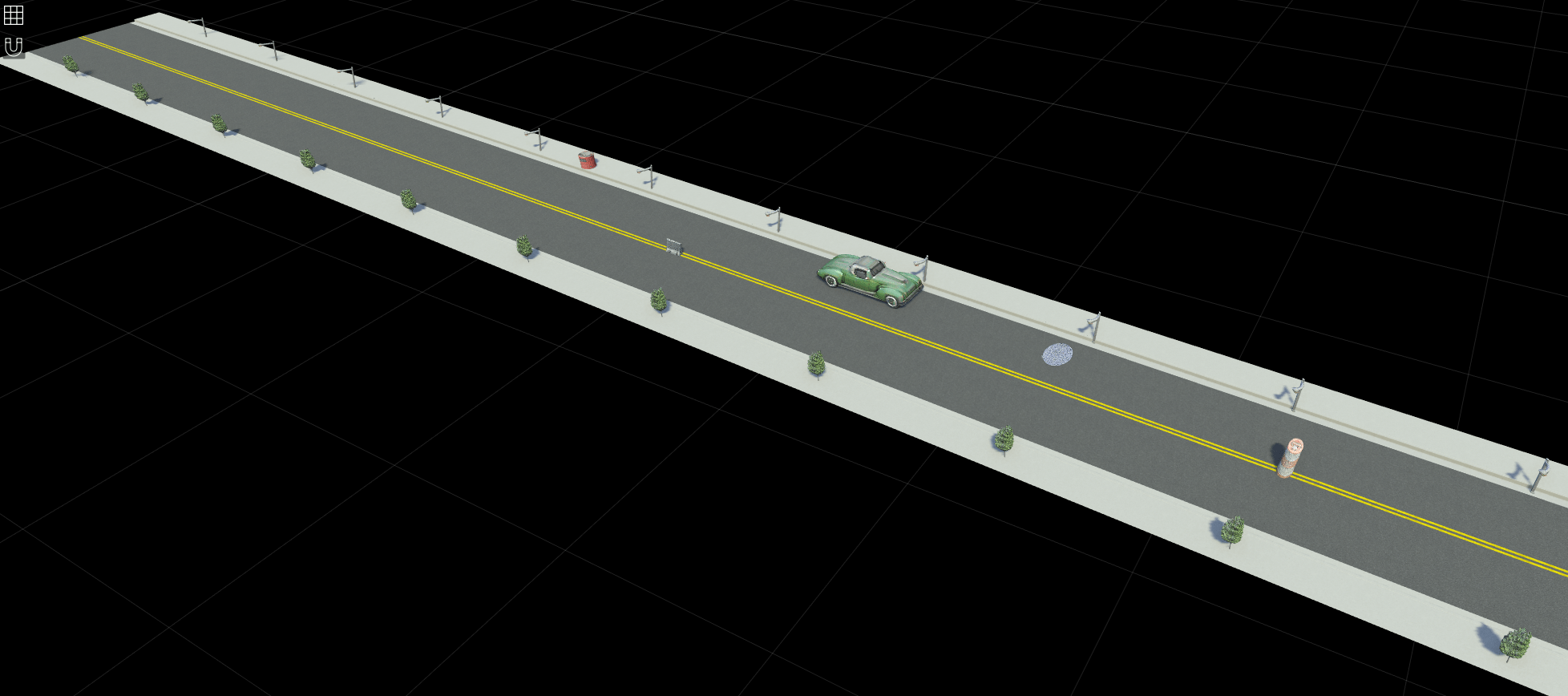
Generate RoadRunner Scenario from Recorded Sensor Data
Generate RoadRunner Scenario from recorded GPS data and preprocessed actor track list.
Ego Vehicle Localization Using GPS and IMU Fusion for Scenario Generation
Localize ego vehicle by fusing GPS and IMU sensor data to generate virtual driving scenario.

Ego Localization Using Lane Detections and HD Map for Scenario Generation
Perform lane-level localization of ego vehicle using lane detections, HD map data, and GPS data.

Extract Lane Information from Recorded Camera Data for Scene Generation
Extract lane information from raw camera data to generate ASAM OpenDRIVE® scene or RoadRunner scene.

Generate RoadRunner Scene Using Labeled Camera Images and Raw Lidar Data
Generate road scene with lanes from labeled camera images and raw lidar data.

Extract Vehicle Track List from Recorded Lidar Data for Scenario Generation
Extract actor track list from recorded lidar data using pretrained vehicle detection model and JPDA tracker.

Fuse Prerecorded Lidar and Camera Data to Generate Vehicle Track List for Scenario Generation
Generate scenario by fusing and smoothing tracked lidar data and camera data.

Generate RoadRunner Scene with Trees and Buildings Using Recorded Lidar Data
Generate RoadRunner scene with trees and buildings using recorded lidar data.
Simulate RoadRunner Scenario with Custom 3D Assets Generated from Single-View Camera Images
Simulate RoadRunner scenario with assets from camera images.