극점 및 영점 위치
이 예제에서는 동적 시스템의 극점과 영점 위치를 pzplot을 사용해 시각적으로 검토하고, pole과 zero를 사용해 수치적으로 검토하는 방법을 보여줍니다.
극점과 영점 위치 검사는 안정성 분석이나 모델 단순화를 위한 거의 상쇄되는 극점-영점 쌍 식별 같은 작업에 유용합니다. 이 예제에서는 플랜트는 같고 제어기는 다른 두 폐루프 시스템을 비교합니다.
두 폐루프 시스템을 나타내는 동적 시스템 모델을 만듭니다.
G = zpk([],[-5 -5 -10],100); C1 = pid(2.9,7.1); CL1 = feedback(G*C1,1); C2 = pid(29,7.1); CL2 = feedback(G*C2,1);
제어기 C2는 비례 이득이 훨씬 큽니다. 이를 제외하면 두 폐루프 시스템인 CL1과 CL2는 동일합니다.
CL1과 CL2의 극점과 영점 위치를 시각적으로 검사합니다.
pzplot(CL1,CL2) grid
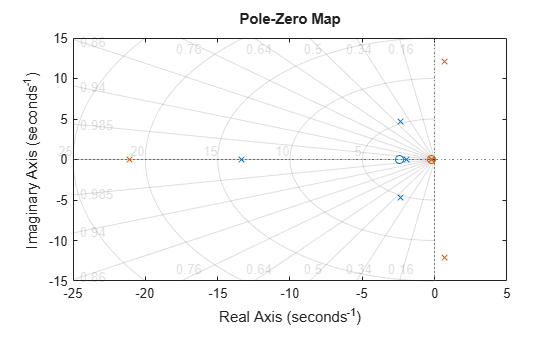
pzplot은 극점과 영점 위치를 복소 평면에 각각 x 및 o 표시로 플로팅합니다. 사용자가 여러 모델을 제공하면 pzplot은 각 모델의 극점과 영점을 다른 색으로 플로팅합니다. 여기에서 CL1의 극점과 영점은 파란색이며, CL2의 극점과 영점은 녹색입니다.
플롯은 CL1의 모든 극점이 좌반면에 있다고 표시하며, 따라서 CL1은 안정적입니다. 플롯의 방사형 그리드 표식을 확인하면 진동(복소) 극점의 감쇄가 약 0.45임을 알 수 있습니다. 또한 CL2의 극점은 우반면에 있으며, 따라서 안정적이지 못하다는 사실도 알 수 있습니다.
CL2의 극점 및 영점 위치의 숫자 값을 계산합니다.
z = zero(CL2); p = pole(CL2);
zero와 pole은 시스템의 영점 및 극점 위치가 포함된 열 벡터를 반환합니다.