sampleBlock
Sample Control Design blocks in generalized model
Syntax
Description
Msamp = sampleBlock(M,name,vals)M.
The result Msamp is a model array of size [size(M)
N] obtained by replacing the block with the specified values,
where N is the number of values in vals.
Msamp = sampleBlock(M,nameset1,valset1,nameset2,valset2,...,namesetM,valsetM)nameset1,nameset2,...,namesetM can each be a single block
name (see name) or a cell array of names (see
nameset). The model M is sampled over
a grid of size [N1 N2 ... NM], where N1 is the
number of values in valset1, N2 is the number
of values in valset2, and so on. The resulting
Msamp is an array of size [size(M) N1 N2 ...
NM].
Examples
Sample Real Parameter in Tunable Model
Create the first-order model , where is a tunable real parameter.
tau = realp('tau',5);
G = tf(1,[tau 1]);Evaluate this transfer function for = 3,4,..,7. The result is a 5-by-1 array of first-order models.
Gs = sampleBlock(G,'tau',3:7);
size(Gs)5x1 array of state-space models. Each model has 1 outputs, 1 inputs, and 1 states.
Sample Multiple Parameters in Tunable Model
Create a model with a pole at s = a and a gain of b*c, where a, b, and c are tunable scalars.
a = realp('a',1); b = realp('b',3); c = realp('c',1); G = tf(b*c,[1 a]);
Pick 5 samples for a and 3 samples for (b,c) pairs. Evaluate G over the corresponding 5-by-3 grid of (a,b,c) combinations.
as = 0.8:0.1:1.2; bs = 2:4; cs = [0.5 1 1.5]; Gs = sampleBlock(G,'a',as,{'b','c'},{bs,cs});
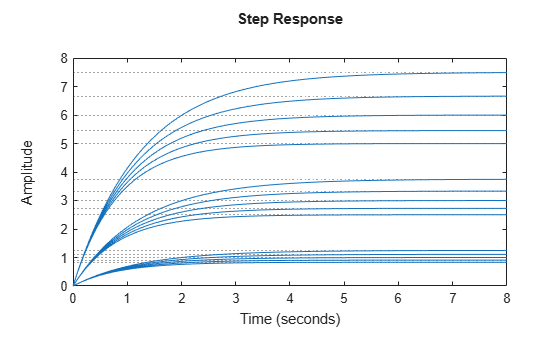
Grouping the values for b and c in cell arrays causes sampleBlock to treat them as the (b,c) pairs, (2,0.5), (3,1), and (1,5). Gs is a 5-by-3 array of state-space models, in which a varies along the first dimension and (b,c) varies along the second dimension. Thus, for example, Gs(:,:,3,2) corresponds to a = 1, (b,c) = (3,1).
A step plot shows a set of responses for each of the three (b,c) pairs. Each set contains a response for each of the five a values.
stepplot(Gs)
If you do not group the values, sampleBlock replaces all values independently, resulting in a 5-by-3-by-3 model array.
GsInd = sampleBlock(G,'a',as,'b',bs,'c',cs); size(GsInd)
5x3x3 array of state-space models. Each model has 1 outputs, 1 inputs, and 1 states.
For example, in GsInd, Gs(:,:,3,2,1) is a model with a = 1, b = 3, and c = 0.5.
Input Arguments
Output Arguments
Version History
Introduced in R2016a
See Also
replaceBlock | rsampleBlock | getValue | genss | genmat | uss (Robust Control Toolbox)
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)