교육
이벤트
학습 관련 자료
도움말 센터를 방문하면 제품 문서를 살펴보고, 커뮤니티 포럼에 참여하며, 릴리스 정보 등을 확인할 수 있습니다.
MATLAB 및 Simulink 비디오
제품에 대해 자세히 알아보고, 시연을 보며, 새로운 기능을 살펴볼 수 있습니다.
회사
채용
MathWorks의 탈탄소화
MathWorks에서 지구의 자원을 보존하고 복원하기 위해 기울이는 노력에 대해 알아볼 수 있습니다.
검색
비디오
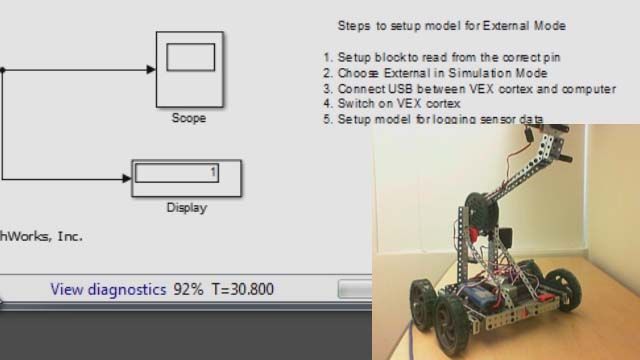
Simulate and design a control algorithm for a self-balancing robot. Deploy this algorithm on hardware using Simulink®
Published: 8 May 2014
Bridging Wireless Communications Design and Testing with MATLAB
Feedback
Featured Product
LEGO MINDSTORMS EV3 Programming Using Simulink
Developing a New Control Unit Using an FPGA
Using Simulink to Program Raspberry Pi for Image Inversion
Implementation of Algorithm for Extension of Unambiguous...
Debugging of VEX Simulink Models Using External Mode
View more related videos
웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다:
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
사이트 성능 최적화 방법
최고의 사이트 성능을 위해 중국 사이트(중국어 또는 영어)를 선택하십시오. 현재 계신 지역에서는 다른 국가의 MathWorks 사이트 방문이 최적화되지 않았습니다.
미주
유럽
아시아 태평양
지역별 지사에 문의