Simulink for Adaptive AUTOSAR
Adaptive AUTOSAR is a modern software framework intended for high-performance, on-board computers often used in autonomous systems. Based on POSIX and C++, it supports dynamic and updatable software as well as services-oriented communications and has extensions for safety and security.
In this talk, MathWorks introduces you to Adaptive AUTOSAR concepts and showcases how the Simulink® product family offers support for Adaptive AUTOSAR including:
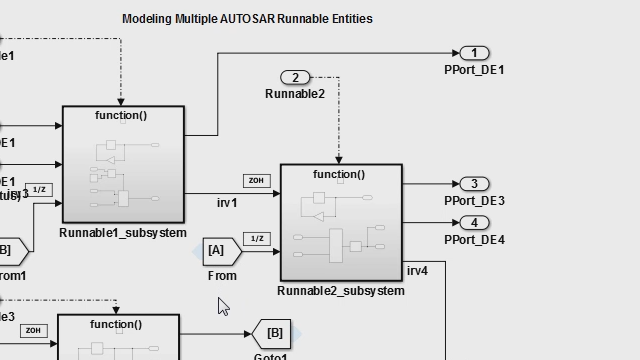
- Modeling and simulation of Adaptive software components using service-oriented communications
- Support for AUTOSAR Adaptive schema 18-10
- C++ production code generation with Adaptive middleware interfaces (ara::com), and AUTOSAR XML export
Recorded: 11 Apr 2019