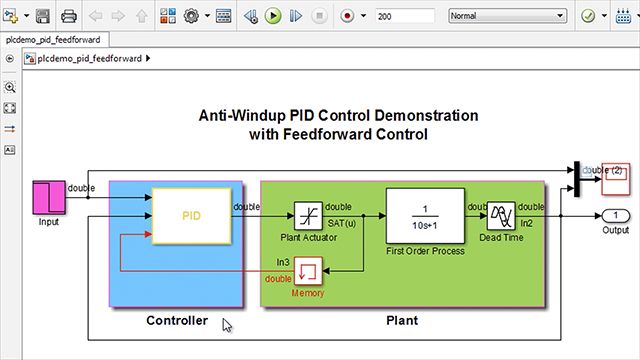
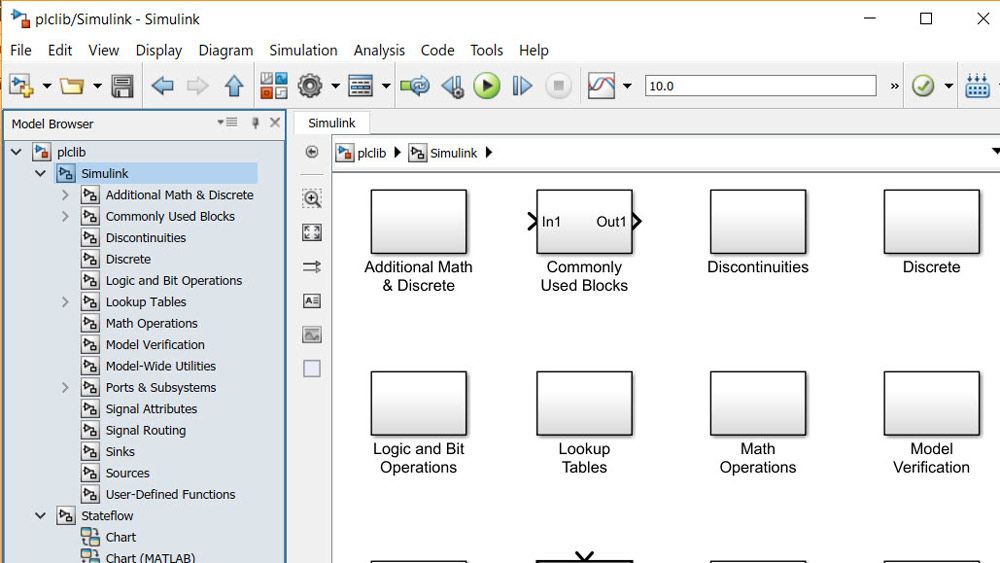
Simulink PLC Coder는 Simulink 모델, Stateflow 차트, MATLAB 함수로부터 하드웨어 독립적인 IEC 61131-3 Structured Text 및 래더 다이어그램을 생성할 수 있습니다. Structured Text는 PLCopen XML 형식 이외에도 3S-Smart Software Solutions CODESYS®, Rockwell Automation Studio 5000, Siemens TIA Portal, Omron® Sysmac® Studio 등 널리 사용되는 IDE(통합 개발 환경)에서 지원하는 다른 파일 형식으로도 생성할 수 있습니다. 래더 다이어그램은 Rockwell Automation Studio 5000에서 지원하는 파일 형식으로 생성할 수 있습니다. 따라서 사용자는 애플리케이션을 컴파일해서 수많은 PLC(프로그램 가능 논리 제어기) 및 PAC(프로그램 가능 자동화 제어기) 기기에 배포할 수 있습니다.
Simulink PLC Coder는 PLC 및 PAC IDE와 시뮬레이션 툴을 사용하여 Structured Text와 래더 다이어그램을 검증하는 테스트벤치를 생성할 수 있습니다. 정적 코드 메트릭 및 모델과 코드 간 양방향 추적성을 포함하는 코드 생성 리포트도 제공합니다. IEC Certification Kit (for IEC 61508 and IEC 61511)를 통해 산업 표준 지원이 가능합니다.





제품 관련 자료:

“모델 기반 설계를 사용하여 우리는 자동 코드 생성을 통해 모델 예측 제어를 PLC에 즉시 구현할 수 있었습니다.”
Yusuke Sugiuchi, Shibaura Mechatronics Corporation
질문이 있습니까?


또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
아시아 태평양
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)