comm.SDRuReceiver
Receive data from USRP device
Description
Add-On Required: This feature requires the Wireless Testbench Support Package for NI USRP Radios add-on.
The comm.SDRuReceiver
System object™ receives data from a USRP™
E320, N3xx series,
X3xx series, or X410 radio, enabling simulation and development for various
software-defined radio applications; for USRP
200-series radios, use the comm.SDRuReceiver
System object from the Communications Toolbox™ Support Package for USRP Radio.
Use this object to communicate with a USRP radio on the same Ethernet subnetwork. You can write a MATLAB® application that uses the System object, or you can generate code for the System object without connecting to a USRP radio.
This object receives signal and control data from a USRP radio using the universal hardware driver (UHD™) from Ettus Research™. The System object receives data from a USRP radio and outputs a column vector or matrix signal with fixed number of rows.
To receive data from a USRP radio device:
Create the
comm.SDRuReceiverobject and set its properties.Call the object as if it were a function.
To learn more about how System objects work, see What Are System Objects?.
Creation
Syntax
Description
rx = comm.SDRuReceiver(Platform=radioDevice)
rx = comm.SDRuReceiver(Platform=radioDevice,IPAddress=radioIPAddress)
rx = comm.SDRuReceiver(___,Name = Value)CenterFrequency = 5e6
specifies the center frequency as 5 MHz.
Properties
Usage
Syntax
Description
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create an SDRu receiver System object for your USRP radio. Set the master clock rate and center frequency.
rx = comm.SDRuReceiver(Platform='X310',IPAddress='192.168.10.2');
Set master clock rate and center frequency.
rx.MasterClockRate = 184.32e6; rx.CenterFrequency = 2.4e9;
Capture 5 seconds of data.
[data,~] = capture(rx,5,'Seconds');Release the hardware.
release(rx);
Create an SDRu receiver System object for a multichannel radio configuration.
radio = comm.SDRuReceiver(Platform ="X300",IPAddress ='192.168.60.2'); radio.ChannelMapping = [1 2]; radio.CenterFrequency = [1.2 1.3]*1e9; radio.Gain = [5 6];
Get the radio information by calling the info function.
info(radio)
ans = struct with fields:
Mboard: 'X300'
RXSubdev: {'UBX RX' 'UBX RX'}
TXSubdev: {'UBX TX' 'UBX TX'}
MinimumCenterFrequency: [-70000000 -70000000]
MaximumCenterFrequency: [6.0800e+09 6.0800e+09]
MinimumGain: [0 0]
MaximumGain: [37.5000 37.5000]
GainStep: [0.5000 0.5000]
CenterFrequency: [1.2000e+09 1.3000e+09]
LocalOscillatorOffset: 0
Gain: [5 6]
MasterClockRate: 200000000
DecimationFactor: 512
BasebandSampleRate: 390625
Create an SDRu receiver System object for a USRP N320 radio. Configure the System object to receive at 1 GHz with a decimation factor of 512 and a master clock rate of 200 MHz. Calculate the baseband sample rate from the master clock rate and decimation factor.
rx = comm.SDRuReceiver( ... Platform="N320/N321", ... IPAddress="192.168.20.2", ... CenterFrequency=1e9, ... MasterClockRate=200e6, ... DecimationFactor=512); sampleRate = rx.MasterClockRate/rx.DecimationFactor;
Create a baseband file writer System object to write the received baseband data to a file named n320_capture.bb. Configure the System object with the same center frequency and sample rate as the SDRu receiver.
rxWriter = comm.BasebandFileWriter( ... 'n320_capture.bb', ... sampleRate,rx.CenterFrequency);
Write the valid baseband data to the file.
for counter = 1:2000 data = rx(); rxWriter(data); end
Display information about the received signal.
info(rxWriter)
ans = struct with fields:
Filename: 'C:\MATLAB\n320_capture.bb'
SamplesPerFrame: 362
NumChannels: 1
DataType: 'int16'
NumSamplesWritten: 724000
Release the System objects.
release(rx); release(rxWriter);
This example shows how to detect overruns when using an SDRu receiver System object and how to overcome overruns by using burst mode buffering.
Detect Lost Samples
Create an SDRu receiver System object for a USRP N210 radio. Configure the System object to receive at 2.5 GHz. To increase the likelihood that an overrun will be occur, set the maximum baseband sample rate by setting the highest supported master clock and a decimation factor of 1. Set the number of samples per frame to 37500. Set the output data type to double.
rx = comm.SDRuReceiver(Platform="N320/N321", ... IPAddress="192.168.20.2", ... CenterFrequency=2.5e9, ... MasterClockRate=250e6, ... DecimationFactor=1, ... SamplesPerFrame=37500, ... OutputDataType="double");
Create a comm.DPSKDemodulator System object for capturing data.
demodulator = comm.DPSKDemodulator(BitOutput=true);
Receive 1000 frames of data using the SDRu receiver System object rx. Additionally output the data continuity flag overrun. Increment a variable n when an overrun is detected. This indicates that the data transmitted from the USRP radio to the host is not contiguous.
n=1; for frame = 1:1000 [data,~,overrun] = rx(); demodulator(data); if overrun == 1 n = n+1; end end
Report the number of frames where overruns were detected.
fprintf("Overruns detected in %d frames without burst mode buffering",n-1)Overruns detected in 54 frames without burst mode buffering
Release the hardware resources.
release(rx)
Use Burst Mode Buffering
To overcome overruns, enable burst mode buffering on the SDRu receiver System object rx. Set the number of frames in a burst to 20.
rx.EnableBurstMode = true; rx.NumFramesInBurst = 20;
Receive 1000 frames of data using burst mode buffering.
n=1; for frame = 1:1000 [data,~,overrun] = rx(); if overrun == 0 demodulator(data); else n=n+1; end end
Report the number of frames where overruns were detected.
fprintf("Overruns detected in %d frames with burst mode buffering",n-1)Overruns detected in 0 frames with burst mode buffering
Release the hardware resources.
release(rx)
Create and initialize the transmitter System object. Set the interpolation factor.
sampleRate = 1e6; tx = comm.SDRuTransmitter(Platform="X310",IPAddress='192.168.40.2',... CenterFrequency=2e9,Gain=20); tx.InterpolationFactor = tx.MasterClockRate/sampleRate;
Create and initialize the receiver System object. Set the decimation factor.
rx = comm.SDRuReceiver(Platform="X310",IPAddress='192.168.40.2',... CenterFrequency=2e9,Gain=20); rx.DecimationFactor = rx.MasterClockRate/sampleRate;
Generate a sine wave for transmission.
sinewave = dsp.SineWave(1,50e3);
sinewave.SampleRate = sampleRate;
sinewave.SamplesPerFrame = 2e4;
sinewave.OutputDataType = 'double';
sinewave.ComplexOutput = true;
txData = sinewave();Initialize the time scope and spectrum analyzer for visualization.
timeScope = timescope(SampleRate=sampleRate); spectrumScope = spectrumAnalyzer(SampleRate=sampleRate, ... ViewType="spectrum"); spectrumScope.PeakFinder.Enabled = true;
Use the transmitRepeat function to transmit the sine wave in the background.
samplePerFrame = 2e4; stopTime = 1; transmitRepeat(tx,txData);
## Waveform transmission has started successfully and will repeat indefinitely. Call the stopTransmission() method to stop the transmission.
pause(10)
disp('Transmission started')Transmission started
Receive the sine wave in the foreground using the receiver System object. Use the isTransmitting function to check if transmission is ongoing. Visualize the received data using the time scope and spectrum analyzer.
if isTransmitting(tx) for i = 1:40 [data, ~] = rx(); timeScope(data) spectrumScope(data) end end
![]()
![]()
Stop the background transmission.
stopTransmission(tx);
disp('Transmission ended')Transmission ended
Release the transmitter and receiver System objects.
release(tx); release(rx);
Configure a B210 radio with the serial number 3136D5F. Set the PPS signal source to the PPS signal from a GPSDO and enable GPS time synchronization. Set the clock source to GPSDO. Set the master clock rate to 20MHz, decimation factor to 20, and number of received samples per frame to 10.
Create an SDRu receiver System object to receive data form the USRP™ device.
format long; rx = comm.SDRuReceiver(Platform = "B210", SerialNum='3136D5F', ... PPSSource = "GPSDO", EnforceGPSTimeSync = true, ... ClockSource= "GPSDO", ... MasterClockRate=20e6, DecimationFactor=200, ... SamplesPerFrame = 20000);
Check the GPS lock status.
GPSLockStatus = 0; while ~GPSLockStatus disp("Trying to lock to GPS constellation ..."); GPSLockStatus = gpsLockedStatus(rx); end
Trying to lock to GPS constellation ...
if GPSLockStatus disp("GPSDO is locked. Acquiring data from radio ..."); [data,~, ~,GPSTimestamps] = rx(); d = datetime(GPSTimestamps(1), 'convertfrom', 'posixtime', 'Format', 'MM/dd/yy HH:mm:ss.SSS','TimeZone','Asia/Calcutta'); end
GPSDO is locked. Acquiring data from radio ...
USRP time synchronized to GPS time
Release the System object. Display the GPS timestamp of the first received data sample.
release(rx);
fprintf('GPS timestamp of first sample: %s',d);GPS timestamp of first sample: 07/27/23 16:33:38.078
Receive phase synchronized signals using the TwinRX daughterboard. Transmit the sinusoidal signals with a B210 radio and receive the signals on an X300 radio with two TwinRX daughterboards. This example requires two MATLAB sessions running on your host computer.
To run this example, you require:
300-Series USRP radio (X3xx) and Wireless Testbench Support Package for NI USRP Radios. For information on mapping an NI USRP device to an Ettus Research 300-series USRP device, see Supported Radio Devices (Wireless Testbench).
200-Series USRP radio (B2xx or N2xx) and Communications Toolbox Support Package for USRP Radio, required when using the radio as the transmitter. For information on mapping an NI™ USRP device to an Ettus Research 200-series USRP device, see Supported Hardware and Required Software.
In the first MATLAB session, run the transmitter_twinrx.m script.
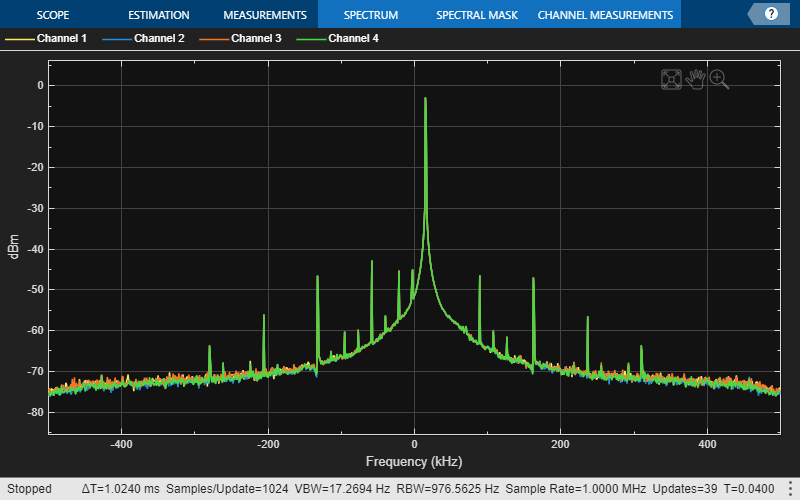
In the second MATLAB session, configure an X300 radio with an IP address of 192.168.20.2. Set the radio to receive at 2.45 GHz with a decimation factor of 200 and a master clock rate of 200 MHz. Enable the TwinRX daughterboard and the TwinRX phase synchronization capability to receive phase synchronized signals. Set the ChannelMapping property to [1 2 3 4]. Connect the power splitter from an B210 transmitter to four receiver channels of the X300 radio for calibration.
rx = comm.SDRuReceiver(Platform = "X300", ... IPAddress = '192.168.50.2', ... OutputDataType = "double", ... IsTwinRXDaughterboard = true, ... EnableTwinRXPhaseSynchronization = true, ... ChannelMapping = [1 2 3 4], ... MasterClockRate = 200e6, ... DecimationFactor = 200, ... Gain = 45, ... CenterFrequency = 2.45e9, ... SamplesPerFrame = 4000);
Set the frame duration for the signal reception based on the samples per frame and sample rate. Create time scope and frequency scope System objects to display time-domain and frequency-domain signals, respectively. Display a message when reception starts.
frameduration = (rx.SamplesPerFrame)/(200e6/200); time = 0; timeScope = timescope(TimeSpanSource = "Property",... TimeSpan = 4/30e3,SampleRate = 200e6/200); spectrumScope = spectrumAnalyzer('SampleRate',200e6/200); spectrumScope.ReducePlotRate = true; disp("Reception Started");
Reception Started
Inside a while-loop, receive the sine wave using the rx System object. Normalize the signal with respect to the amplitude for each receive channel. Compute the fast Fourier transform (FFT) of each normalized signal. Calculate the phase difference between channels 1 and 2, channels 1 and 3, and channels 1 and 4. Display the phase difference between channel 1 and each of the other channels of the TwinRX daughterboard.
counter = 0; while time < 10 && counter < 10 data = rx(); amp(1) = max(abs(data(:,1))); amp(2) = max(abs(data(:,2))); amp(3) = max(abs(data(:,3))); amp(4) = max(abs(data(:,4))); maxAmp = max(amp); if any(~amp) normalizedData = data; else normalizedData(:,1) = maxAmp/amp(1)*data(:,1); normalizedData(:,2) = maxAmp/amp(2)*data(:,2); normalizedData(:,3) = maxAmp/amp(3)*data(:,3); normalizedData(:,4) = maxAmp/amp(4)*data(:,4); end freqOfFirst = fft(normalizedData(:,1)); freqOfSecond = fft(normalizedData(:,2)); freqOfThird = fft(normalizedData(:,3)); freqOfFourth = fft(normalizedData(:,4)); angle1 = rad2deg(angle(max(freqOfFirst)/max(freqOfSecond))); angle2 = rad2deg(angle(max(freqOfFirst)/max(freqOfThird))); angle3 = rad2deg(angle(max(freqOfFirst)/max(freqOfFourth))); timeScope([real(normalizedData),imag(normalizedData)]); spectrumScope(normalizedData); time = time + frameduration; counter = counter +1; disp([' Phase difference between channel 1 and 2: ', num2str(angle1)]); disp([' Phase difference between channel 1 and 3: ', num2str(angle2)]); disp([' Phase difference between channel 1 and 4: ', num2str(angle3)]); disp(' '); end
Phase difference between channel 1 and 2: 100.1443
Phase difference between channel 1 and 3: -70.6504
Phase difference between channel 1 and 4: -165.1414
Phase difference between channel 1 and 2: 100.147
Phase difference between channel 1 and 4: -165.1362
Phase difference between channel 1 and 3: -70.6436
Phase difference between channel 1 and 2: 100.1514
Phase difference between channel 1 and 2: 100.1505
Phase difference between channel 1 and 4: -165.1411
Phase difference between channel 1 and 2: 100.1553
Phase difference between channel 1 and 3: -70.6434
Phase difference between channel 1 and 2: 100.1513
Phase difference between channel 1 and 4: -165.1357
Phase difference between channel 1 and 2: 100.1536
Phase difference between channel 1 and 2: 100.1451
Phase difference between channel 1 and 3: -70.6371
Phase difference between channel 1 and 4: -165.1205
Phase difference between channel 1 and 2: 100.1567
Phase difference between channel 1 and 2: 100.152
Phase difference between channel 1 and 3: -70.636
Phase difference between channel 1 and 4: -165.1287
Phase difference between channel 1 and 3: -70.6337
Phase difference between channel 1 and 3: -70.6466
Phase difference between channel 1 and 3: -70.64
Phase difference between channel 1 and 4: -165.1361
Phase difference between channel 1 and 3: -70.6353
Phase difference between channel 1 and 3: -70.6353
Phase difference between channel 1 and 4: -165.1323
Phase difference between channel 1 and 4: -165.1197
Phase difference between channel 1 and 4: -165.1248
release(timeScope);

release(spectrumScope);
release(rx);
disp("Reception ended"); Reception ended
Since R2025a
This example shows how to transmit and receive on the TX/RX antenna port of the radio using a single antenna. In this example, Radio 1 transmits a 50 kHz sine wave to Radio 2 at a specified trigger time, while Radio 2 receives the signal at the same time using the TX/RX port. Similarly, Radio 2 transmits a 70 kHz sine wave back to Radio 1 using the TX/RX port, which Radio 1 receives at the same trigger time.
To run this example, you use two X-series radios equipped with GPSDO. Connect a GPS antenna to each radio and make sure that the GPS antennas have a clear view of the sky to receive GPS signals. Attach an antenna to the TX/RX antenna port of each radio.
This example requires two MATLAB sessions: one for Radio 1 and another for Radio 2. You run this file for Radio 1 in one MATLAB session, and simultaneously run the helperRadio2.m file in another session for Radio 2.
Create a sine wave for transmission.
sinewave = dsp.SineWave(1,50e3);
sinewave.SampleRate = 100e6/100;
sinewave.SamplesPerFrame = 2e4;
sinewave.OutputDataType = 'double';
sinewave.ComplexOutput = true;
data = sinewave();Initialize the spectrum analyzer System object to visualize the spectrum of the signal received from Radio 2.
spectrumScope = spectrumAnalyzer('SampleRate',sinewave.SampleRate); spectrumScope.ViewType="spectrum"; spectrumScope.PeakFinder.Enabled = true; spectrumScope.Name = "Signal Received from Radio 2";
Create a transmitter System object for Radio 1.
% Radio 1 Transmitter tx1 = comm.SDRuTransmitter(Platform="X310",... IPAddress ='192.168.70.2',... MasterClockRate=200e6,... InterpolationFactor=200,... CenterFrequency=2.45e9,Gain=10,... TransportDataType="int16",... PPSSource="GPSDO",ClockSource="GPSDO",... EnableTimeTrigger=true,... EnforceGPSTimeSync=true);
Check the GPS lock status.
GPSLockStatus = 0; while ~GPSLockStatus disp("Trying to lock to GPS constellation ..."); GPSLockStatus = gpsLockedStatus(tx1); end
Trying to lock to GPS constellation ...
Set the transmit trigger time so that the transmit trigger time for Radio 1 matches the receive trigger time for Radio 2. Then, transmit the sine wave.
if GPSLockStatus disp("GPSDO is locked."); tx1.TriggerTime = posixtime(datetime(2025,1,29,23,45,00,'TimeZone','Asia/Calcutta')); % Trigger time must be a double for i=1:40 tx1(data); end end
GPSDO is locked.
USRP time synchronized to GPS time ACK RECEIVED
Release the Radio 1 transmitter System object.
release(tx1);
To receive the sine wave transmitted from Radio 2, create a receiver System object for Radio 1. Set the ReceiveAntennaPort property to TX/RX.
% Radio 1 Receiver rx1 = comm.SDRuReceiver(Platform="X310",... IPAddress='192.168.70.2',... MasterClockRate=200e6,... DecimationFactor=200,... CenterFrequency=2.45e9,Gain=30,... TransportDataType="int16",... PPSSource="GPSDO",ClockSource="GPSDO",... EnableTimeTrigger=true,... EnforceGPSTimeSync=true); rx1.ReceiveAntennaPort = 'TX/RX'; rx1.SamplesPerFrame = 20e3;
Check the GPS lock status.
GPSLockStatus = 0; while ~GPSLockStatus disp("Trying to lock to GPS constellation ..."); GPSLockStatus = gpsLockedStatus(rx1); end
Trying to lock to GPS constellation ...
Set the receive trigger time so that the receive trigger time for Radio 1 matches the transmit trigger time for Radio 2. Make sure that the transmit time slot and receive time slot for both the radios are at least one minute apart.
if GPSLockStatus disp("GPSDO is locked."); rx1.TriggerTime = posixtime(datetime(2025,1,29,23,46,00,'TimeZone','Asia/Calcutta')); rxData1 = rx1(); % Receive the signal from Radio 2. end
GPSDO is locked.
USRP time synchronized to GPS time
Visualize the spectrum of the signal and get the peak frequency.
spectrumScope(rxData1);
![]()
spectrumData1 = getMeasurementsData(spectrumScope); sineWaveFreqRadio2 = spectrumData1.PeakFinder.Frequency(1)
sineWaveFreqRadio2 = 7.0312e+04
Release the Radio 1 receiver System object.
release(rx1);
This example shows how to generate a MEX function from a MATLAB function that uses an SDRu Receiver System object to receive data.
Display the sdruReceiveData function. The function receives data using a comm.SDRuReceiver System Object and returns the time taken to receive the signal and the number of overruns.
type sdruReceiveDatafunction [receiveTime,overrunCount] = sdruReceiveData()
duration = 10;
masterClockRate = 125e6;
decimationFactor = 1;
samplesPerFrame = 20e3;
sampleRate = masterClockRate/decimationFactor;
frameDuration = samplesPerFrame/sampleRate;
iterations = duration/frameDuration;
rx = comm.SDRuReceiver( ...
Platform = "N310", ...
IPAddress = "192.168.20.2", ...
MasterClockRate = masterClockRate, ...
DecimationFactor = decimationFactor, ...
OutputDataType = "double");
count = 0;
rx();
disp("Receiving data...");
tic
for i = 1:iterations
[~,~,overrun] = rx();
if overrun
count = count + 1;
end
end
receiveTime = toc;
overrunCount = count;
release(rx);
end
Run the sdruReceiveData function to receive data and return the transmission time and the number of overruns.
[receiveTime,overrunCount] = sdruReceiveData()
Receiving data...
receiveTime = 3.3393
overrunCount = 4
Use the codegen (MATLAB Coder) function to generate a MEX file, sdruReceiveMex, from the sdruReceiveData function. Run the MEX function to receive data and return the transmission time and the number of underruns.
codegen sdruReceiveData -o sdruReceiveMex;
Code generation successful.
[receiveTimeMex,underrunCountMex] = sdruReceiveMex()
Receiving data...
receiveTimeMex = 0.2844
underrunCountMex = 2