randrot
균등분포를 따르는 무작위 회전
설명
R = randrot
R = randrot([m1,...,mN])m1×...×mN 배열을 반환하며, 여기서 m1,…, mN은 각 차원의 크기를 나타냅니다. 예를 들어 randrot([3,4])는 무작위 단위 쿼터니언으로 구성된 3×4 행렬을 반환합니다.
예제
균등분포를 따르는 무작위 회전으로 구성된 3×3 행렬을 생성합니다.
r = randrot(3)
r = 3×3 quaternion array
0.17446 + 0.59506i - 0.73295j + 0.27976k 0.69704 - 0.060589i + 0.68679j - 0.19695k 0.35191 + 0.74478i + 0.52322j - 0.21842k
0.21908 - 0.89875i - 0.298j + 0.23548k -0.049744 + 0.59691i + 0.56459j + 0.56786k 0.17527 - 0.46955i + 0.52986j - 0.68414k
0.6375 + 0.49338i - 0.24049j + 0.54068k 0.2979 - 0.53568i + 0.31819j + 0.72323k -0.30189 - 0.22864i - 0.83159j + 0.40626k
500개의 무작위 쿼터니언으로 구성된 벡터를 만듭니다. rotatepoint를 사용하여 점 (1, 0, 0)에 적용된 무작위 회전의 분포를 시각화합니다.
q = randrot(500,1);
pt = rotatepoint(q, [1 0 0]);
figure
scatter3(pt(:,1), pt(:,2), pt(:,3))
axis equal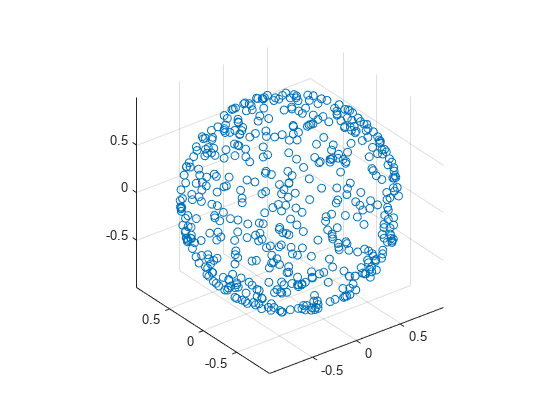
입력 인수
출력 인수
참고 문헌
[1] Shoemake, K. "Uniform Random Rotations." Graphics Gems III (K. David, ed.). New York: Academic Press, 1992.
확장 기능
버전 내역
R2020b에 개발됨