알고리즘 개발
ArduPilot® Autopilot에 배포하기 위한 알고리즘을 개발하고 모델을 준비합니다.
블록
도움말 항목
- What is Sample Time and How Does it Work?
Concept of sample time and its role in simulations and control systems.
- Manually Set COM Port for Uploading and Communication
Set COM port for Upload and Communication in Simulink® models.
- Setting Up Communication Between ArduPilot Hardware and Ground Control Station
Learn how to establish communication between ArduPilot hardware and a Ground Control Station.
- Actuator Selection in Ground Control Station
Configure and verify actuator outputs using GCS.
- Deployment, Connected I/O, and Monitor and Tune
Deploy models, tune parameters in real time, and monitor performance.
추천 예제
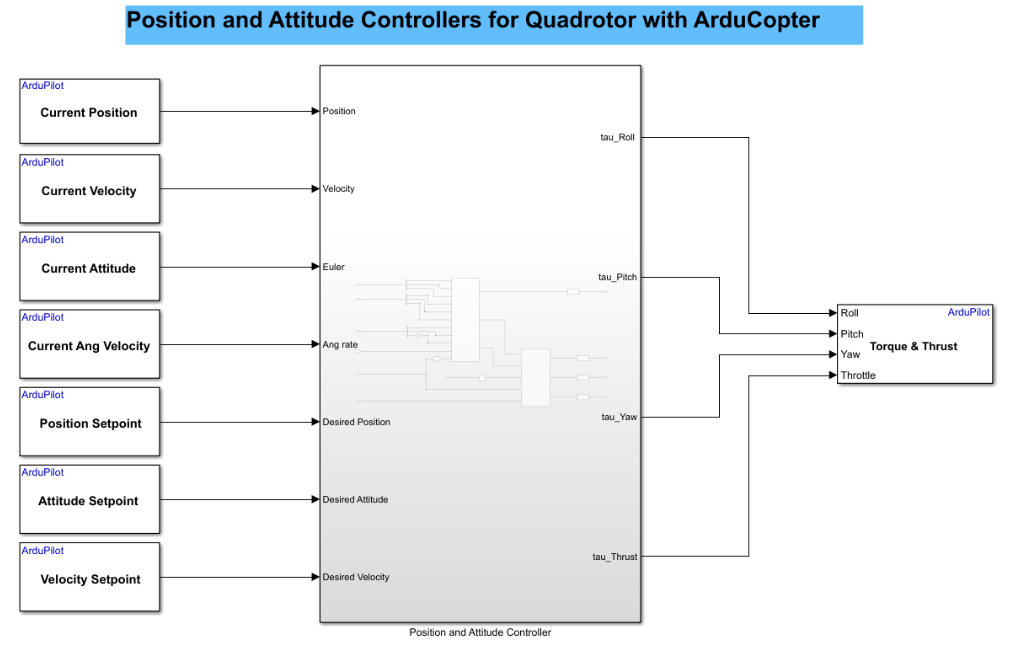
Design Position and Attitude Controllers for ArduCopter
Use the UAV Toolbox Support Package for ArduPilot® Autopilots to design position and attitude controllers for ArduCopter in Simulink®. This example is designed to run with the ArduPilot Host Target, allowing you to perform Software-in-the-Loop (SITL) simulation.
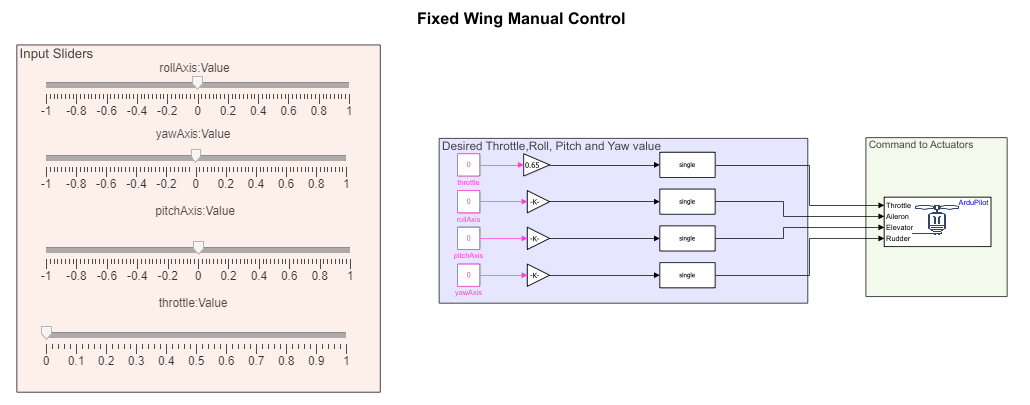
Fly a Custom Multicopter Airframe Using Simulink
Control a custom multicopter airframe by defining a custom mixer matrix in Simulink® and deploying it to ArduPilot® hardware. You will configure motor mixing logic that translates high-level flight commands into individual motor outputs, allowing your multicopter to respond correctly to throttle, roll, pitch, and yaw inputs.

Verify ArduPilot RC Transmitter Input with RC Receive Block
Test your RC transmitter with the RC Receive block in Simulink.
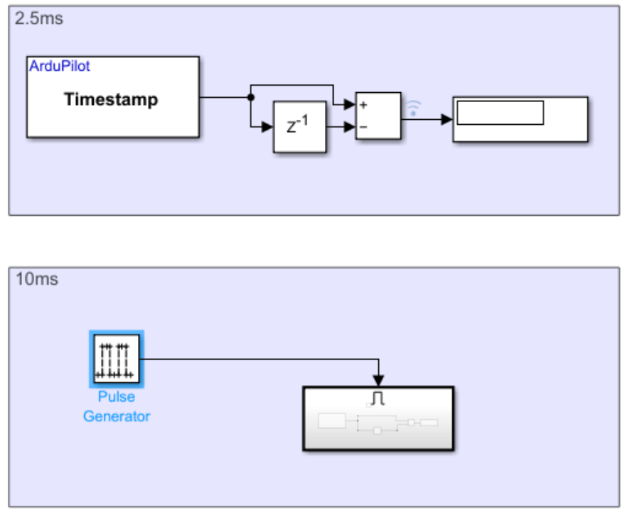
Implement Slower Execution Rates for Blocks in a Single-Rate Model
Use the UAV Toolbox Support Package for ArduPilot® Autopilots to run selected blocks at slower effective rates within a single-rate Simulink model. The support package enforces a single fixed-step execution rate, determined by the main loop frequency of the ArduPilot firmware. As a result, all blocks in the model execute at this base rate. For example, 2.5 ms (400 Hz) for Copter and 20 ms (50 Hz) for Plane.
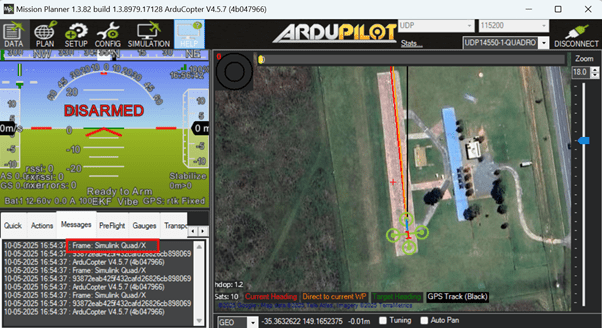
ArduPlane SITL Setup and Control Tutorial Using Simulink
Run an ArduPlane Software-in-the-Loop (SITL) simulation on a Windows PC using Simulink, Windows Subsystem for Linux (WSL), and Mission Planner. The workflow allows you to simulate, control, and tune a fixed-wing autopilot without deploying code to physical hardware.