incrementalConceptDriftDetector
Syntax
Description
IncCDDetector = incrementalConceptDriftDetector()
IncCDDetector = incrementalConceptDriftDetector(DetectionMethod)DetectionMethod.
IncCDDetector = incrementalConceptDriftDetector(DetectionMethod,Name=Value)Name=Value
arguments.
Examples
Initiate the concept drift detector using the Drift Detection Method (DDM).
incCDDetector = incrementalConceptDriftDetector("ddm");Create a random stream such that for the first 1000 observations, failure rate is 0.1 and after 1000 observations, failure rate increases to 0.6.
rng(1234) % For reproducibility numObservations = 3000; switchPeriod = 1000; for i = 1:numObservations if i <= switchPeriod failurerate = 0.1; else failurerate = 0.6; end X(i) = rand()<failurerate; % Value 1 represents failure end
Preallocate variables for tracking drift status.
status = zeros(numObservations,1); statusname = strings(numObservations,1);
Continuously feed the data to the drift detector and perform incremental drift detection. At each iteration:
Update statistics of the drift detector and monitor for drift using the new data point with
detectdrift. (Note:detectdriftchecks for drift after the warm-up period.)Track and record the drift status for visualization purposes.
When a drift is detected, reset the incremental concept drift detector by using
reset.
for i = 1:numObservations incCDDetector = detectdrift(incCDDetector,X(i)); statusname(i) = string(incCDDetector.DriftStatus); if incCDDetector.DriftDetected status(i) = 2; incCDDetector = reset(incCDDetector); % If drift detected, reset the detector sprintf("Drift detected at Observation #%d. Detector reset.",i) elseif incCDDetector.WarningDetected status(i) = 1; else status(i) = 0; end end
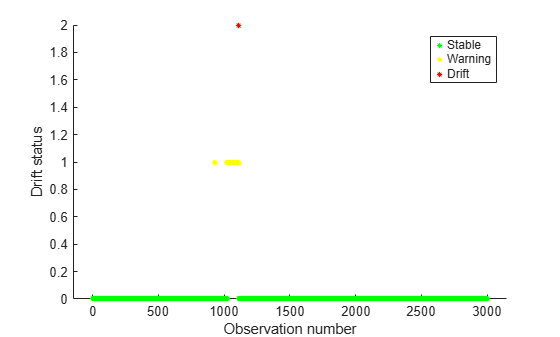
ans = "Drift detected at Observation #1078. Detector reset."
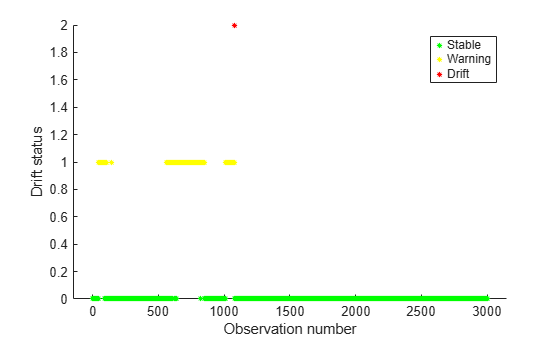
After the change in the failure rate at observation number 1000, detectdrift detects the shift at observation number 1078.
Plot the drift status versus the observation number.
gscatter(1:numObservations,status,statusname,'gyr','*',4,'on',"Observation number","Drift status")
Create a random stream such that the observations come from a normal distribution with standard deviation 0.75, but the mean changes over time. First 1000 observations come from a distribution with mean 2, the next 1000 come from a distribution with mean 4, and the following 1000 come from a distribution with mean 7.
rng(1234) % For reproducibility numObservations = 3000; switchPeriod1 = 1000; switchPeriod2 = 2000; X = zeros([numObservations 1]); % Generate the data for i = 1:numObservations if i <= switchPeriod1 X(i) = normrnd(2,0.75); elseif i <= switchPeriod2 X(i) = normrnd(4,0.75); else X(i) = normrnd(7,0.75); end end
In an incremental drift detection application, access to data stream and model update would happen consecutively. One would not collect the data first and then feed into the model. However, for the purpose of clarification, this example demonstrates the simulation of data separately.
Specify the drift warm-up period as 50 observations and estimation period for the data input bounds as 100.
driftWarmupPeriod = 50; estimationPeriod = 100;
Initiate the incremental concept drift detector. Utilize the Hoeffding's bounds method with exponentially weighted moving average method (EWMA). Specify the input type and warm-up period.
incCDDetector = incrementalConceptDriftDetector("hddmw",InputType="continuous", ... WarmupPeriod=driftWarmupPeriod,EstimationPeriod=estimationPeriod)
incCDDetector =
HoeffdingDriftDetectionMethod
PreviousDriftStatus: 'Stable'
DriftStatus: 'Stable'
IsWarm: 0
NumTrainingObservations: 0
Alternative: 'greater'
InputType: 'continuous'
TestMethod: 'ewma'
Properties, Methods
incDDetector is a HoeffdingDriftDetectionMethod object. When you first create the object, properties such as DriftStatus, IsWarm, CutMean, and NumTrainingObservations are at their initial state. detectdrift updates them as you feed the data incrementally and monitor for drift.
Preallocate the batch size and the variables to record drift status and the mean the drift detector computes with each income of data.
status = zeros([numObservations 1]); statusname = strings([numObservations 1]); M = zeros([numObservations 1]);
Simulate the data stream of one observation at a time and perform incremental drift detection. At each iteration:
Monitor for drift using the new data with
detectdrift.Track and record the drift status and the statistics for visualization purposes.
When a drift is detected, reset the incremental concept drift detector by using the function
reset.
for i = 1:numObservations incCDDetector = detectdrift(incCDDetector,X(i)); M(i) = incCDDetector.Mean; if incCDDetector.DriftDetected status(i) = 2; statusname(i) = string(incCDDetector.DriftStatus); incCDDetector = reset(incCDDetector); % If drift detected, reset the detector sprintf("Drift detected at observation #%d. Detector reset.",i) elseif incCDDetector.WarningDetected status(i) = 1; statusname(i) = string(incCDDetector.DriftStatus); sprintf("Warning detected at observation #%d.",i) else status(i) = 0; statusname(i) = string(incCDDetector.DriftStatus); end end
ans = "Warning detected at observation #1024."
ans = "Warning detected at observation #1025."
ans = "Warning detected at observation #1026."
ans = "Warning detected at observation #1027."
ans = "Warning detected at observation #1028."
ans = "Warning detected at observation #1029."
ans = "Drift detected at observation #1030. Detector reset."
ans = "Warning detected at observation #2012."
ans = "Warning detected at observation #2013."
ans = "Warning detected at observation #2014."
ans = "Drift detected at observation #2015. Detector reset."
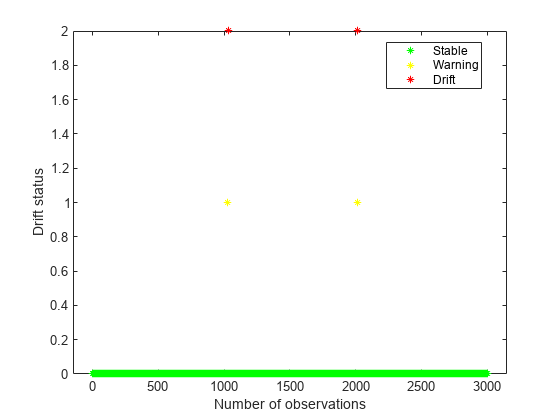
Plot the drift status versus the observation number.
gscatter(1:numObservations,status,statusname,'gyr','*',5,'on',"Number of observations","Drift status")
Plot the mean values versus the number of observations.
scatter(1:numObservations,M)
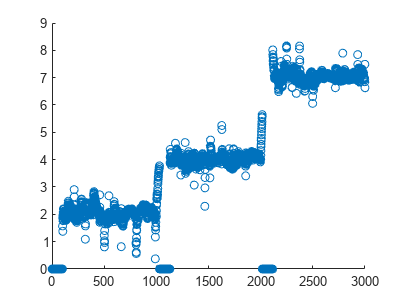
You can see the increase in the sample mean from the plot. The mean value becomes larger and the software eventually detects the drift in the data. Once a drift is detected, reset the incremental drift detector. This also resets the mean value. In the plot, the observations where the sample mean is zero correspond to the estimation periods. There is an estimation period at the beginning and then twice after the drift detector is reset following the detection of a drift.
Initiate the concept drift detector using the Drift Detection Method (DDM).
incCDDetector = incrementalConceptDriftDetector("ddm",Alternative="less",WarmupPeriod=100);
Create a random stream such that for the first 1000 observations, failure rate is 0.4 and after 1000 failure rate decreases to 0.1.
rng(1234) % For reproducibility numObservations = 3000; switchPeriod = 1000; for i = 1:numObservations if i <= switchPeriod failurerate = 0.4; else failurerate = 0.125; end X(i) = rand()<failurerate; % Value 1 represents failure end
Preallocate variables for tracking drift status and the optimal mean and optimal standard deviation value.
optmean = zeros(numObservations,1); optstddev = zeros(numObservations,1); status = zeros(numObservations,1); statusname = strings(numObservations,1);
Continuously feed the data to the drift detector and monitor for any potential change. Record the drift status for visualization purposes.
for i = 1:numObservations incCDDetector = detectdrift(incCDDetector,X(i)); statusname(i) = string(incCDDetector.DriftStatus); optmean(i) = incCDDetector.OptimalMean; optstddev(i) = incCDDetector.OptimalStandardDeviation; if incCDDetector.DriftDetected status(i) = 2; incCDDetector = reset(incCDDetector); % If drift detected, reset the detector sprintf("Drift detected at Observation #%d. Detector reset.",i) elseif incCDDetector.WarningDetected status(i) = 1; else status(i) = 0; end end
ans = "Drift detected at Observation #1107. Detector reset."
After the change in the failure rate at observation number 1000, detectdrift detects the shift at observation number 1096.
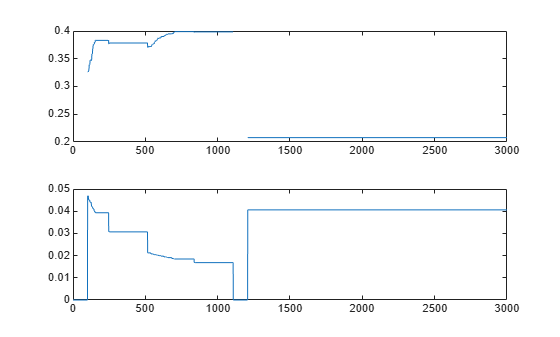
Plot the change in the optimal mean and optimal standard deviation.
tiledlayout(2,1); ax1 = nexttile; plot(ax1,1:numObservations,optmean) ax2 = nexttile; plot(ax2,1:numObservations,optstddev)
Plot the drift status versus the observation number.
figure(); gscatter(1:numObservations,status,statusname,'gyr','*',4,'on',"Observation number","Drift status")
detectdrift concludes on a warning status for multiple observations before it decides on a drift.
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Gama, Joao, Pedro Medas, Gladys Castillo, and Pedro P. Rodrigues. “Learning with drift detection.“ In Brazilian symposium on artificial intelligence, pp. 286-295. Berlin, Heidelberg: Springer. 2004, September.
[2] Frias-Blanco, Isvani, Jose del Campo-Ávila, Ramos-Jimenez Gonzalo, Rafael Morales-Bueno, Augustin Ortiz-Diaz, and Yaile Caballero-Mota. “Online and non-parametric drift detection methods based on Hoeffding's bounds.“ IEEE Transactions on Knowledge and Data Engineering, Vol. 27, No. 3, pp.810-823. 2014.
Version History
Introduced in R2022a
See Also
DriftDetectionMethod | HoeffdingDriftDetectionMethod | reset | detectdrift