전기 드라이브 시스템의 4사분면 동작 시각화하기
R2025a 이후
이 예제는 4개의 사분면 모두에서 동작하는 Motor & Drive (System Level) 블록의 토크-속도 궤적을 시각화하는 데 도움이 됩니다.
모델 열기
FourQuadrantMotorDrive 모델은 단순한 파라미터화 기능을 갖춘 Motor & Drive (System Level) 블록으로 구성되어 있습니다. 이 블록은 최대 토크 값, 최대 전력 값 및 단일 효율 측정값을 사용합니다. 일정한 DC 전압이 전력을 드라이브 시스템에 공급합니다. 기계적 부하는 단순 관성으로 구성됩니다.
모델을 엽니다.
model = "FourQuadrantMotorDrive";
open_system(model);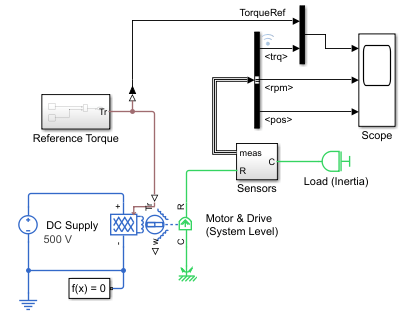
시뮬레이션 실행하기
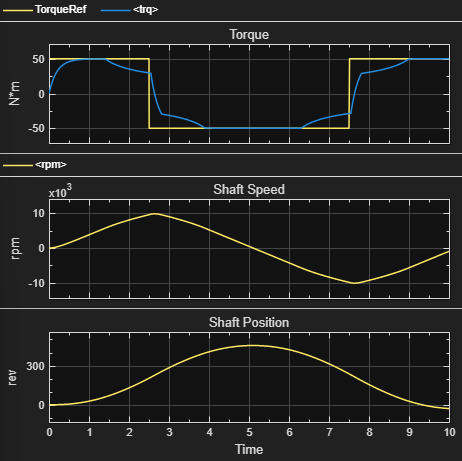
시뮬레이션 시작 시 부하는 정지 상태이며 속도는 0입니다. 기준 토크는 시뮬레이션의 처음 2.5초 동안 양수이며 관성을 양의 속도 값으로 가속합니다. 그런 다음 2.5초가 지나면 기준 토크가 음수가 되고 모터 드라이브 시스템은 발전기로 동작하여 부하를 감속하고 기계적 파워를 DC 공급장치를 위한 전력으로 변환합니다. 속도가 음수이면 블록은 기준 토크를 음수로 유지하여 관성을 음의 속도로 가속하고, 다시 모터로 동작합니다. 마지막으로 관성을 감속하기 위해 기준 토크는 다시 양수가 되고 발전기로 동작합니다.
sim(model);
4개의 사분면에 시뮬레이션 결과 플로팅하기
토크-속도 공간에서 시뮬레이션 궤적을 시각화합니다.
edit FourQuadrantMotorDriveAnimation;