Sliding Mode Controller
히스테리시스 기반 슬라이딩 모드 제어
라이브러리:
Simscape /
Electrical /
Control /
General Control
설명
Sliding Mode Controller 블록은 히스테리시스 기반 슬라이딩 모드 제어(SMC)를 구현합니다.
슬라이딩 모드 제어기의 구조는 다음과 같습니다.
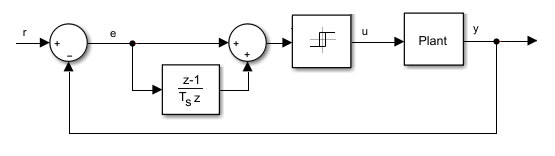
이 제어기에서 lambda는 슬라이딩 인자 파라미터의 값입니다. 오류가 0으로 수렴하는 속도를 변경하려면 슬라이딩 인자 파라미터에 0보다 큰 값을 지정합니다.