PMSM Field-Oriented Control
영구 자석 동기기 자속 기준 제어

라이브러리:
Simscape /
Electrical /
Control /
PMSM Control
설명
PMSM Field-Oriented Control 블록은 영구 자석 동기기(PMSM)의 자속 기준 제어 구조를 구현합니다. 자속 기준 제어(FOC)는 고정된 상 전류를 회전자 프레임으로 변환하여 토크와 플럭스를 분리하는 우수한 AC 모터 제어 전략입니다. 회전자 속도 및 위치가 알려져 있고 해당 응용 분야에서 다음 사항이 요구되는 경우 FOC를 사용하십시오.
시작 시 높은 토크 및 낮은 전류.
높은 효율성.
방정식
PMSM FOC 구조는 회전자 d-q 기준 프레임을 사용하여 토크와 플럭스를 분리합니다. 다음 다이어그램은 이 블록의 전체적인 아키텍처를 보여줍니다.
다이어그램에서 각각은 다음과 같습니다.
ω와 ωref는 각각 측정된 각속도와 기준 각속도입니다.
Tref는 기준 전자기 토크입니다.
i와 v는 고정자 전류와 고정자 전압이고, 아래 첨자 d와 q는 d축과 q축을 나타내고, 아래 첨자 a, b, c는 3개의 고정자 권선을 나타냅니다.
θe는 회전자 전기각입니다.
G는 게이트 펄스이고, 아래 첨자 H와 L은 높음과 낮음을 나타내고, 아래 첨자 a, b, c는 3개의 고정자 권선을 나타냅니다.
제어 모드 파라미터를 사용하여 속도 제어 또는 토크 제어 구현을 선택할 수 있습니다. 블록은 다이어그램에 표시된 대로 속도 제어를 구현합니다. 또한 블록은 Velocity Controller 블록을 제거하고 기준 토크를 직접 적용하여 토크 제어를 구현합니다.
가정
기계 파라미터가 알려져 있습니다.
제한 사항
제어 구조는 단일 샘플 레이트로 구현됩니다.
예제

3상 PMSM 드라이브 모델링하기
이 예제에서는 와이 권선 및 델타 권선 구성의 PMSM(영구 자석 동기기)과 일반적인 하이브리드 차량에 사용할 수 있는 크기의 인버터를 보여줍니다. 인버터는 차량 배터리에 직접 연결되지만 그 사이에 DC-DC 컨버터 단계를 구현할 수도 있습니다. 이 모델에서는 원하는 성능을 얻을 수 있는 아키텍처와 이득을 선택하여 PMSM 제어기를 설계할 수 있습니다. IGBT 턴온과 IGBT 턴오프의 타이밍을 확인하려면 IGBT 소자를 보다 상세한 N-Channel IGBT 블록으로 대체하십시오. 완전한 차량 모델링을 위해 Motor & Drive(System Level) 블록을 사용하여 에너지 기반 모델로 PMSM, 인버터, 제어기를 추상화하십시오.

열 모델에서의 3상 PMSM 드라이브
이 예제에서는 영구 자석 동기기(PMSM)와 일반적인 하이브리드 차량에 사용할 수 있는 크기의 인버터를 보여줍니다. PMSM은 열 모델과 경험적 철손을 포함하고 있습니다. 인버터는 차량 배터리에 직접 연결되지만 그 사이에 DC-DC 컨버터 단계를 구현할 수도 있습니다. 이 모델은 원하는 성능을 얻을 수 있는 아키텍처와 이득을 선택하여 PMSM 제어기를 설계하는 데 사용할 수 있습니다. 고정자 권선과 회전자의 초기 온도는 섭씨 25도로 설정됩니다. 주변 온도는 섭씨 27도입니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
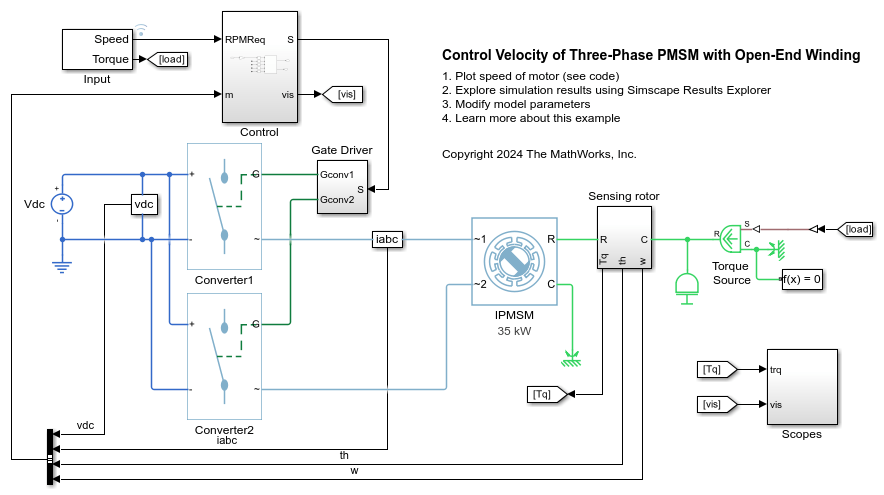
개방 권선이 있는 3상 PMSM의 속도 제어하기
이 예제에서는 개방 권선이 있는 매립형 영구 자석 동기기(IPMSM)의 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 2개의 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 PI 기반 자속 기준 제어 구조를 포함합니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.
포트
입력
출력
파라미터
참고 문헌
[1] Bernardes, T., V. F. Montagner, H. A. Gründling, and H. Pinheiro. "Discrete-time sliding mode observer for sensorless vector control of permanent magnet synchronous machine." IEEE Transactions on Industrial Electronics. Vol. 61, Number 4, 2014, pp. 1679–1691.
[2] Carpiuc, S., and C. Lazar. "Fast real-time constrained predictive current control in permanent magnet synchronous machine-based automotive traction drives." IEEE Transactions on Transportation Electrification. Vol.1, Number 4, 2015, pp. 326–335.
[3] Haque, M. E., L. Zhong, and M. F. Rahman. "Improved trajectory control for an interior permanent magnet synchronous motor drive with extended operating limit." Journal of Electrical & Electronics Engineering. Vol. 22, Number 1, 2003, p. 49.
[4] Yang, N., G. Luo, W. Liu, and K. Wang. "Interior permanent magnet synchronous motor control for electric vehicle using look-up table." In 7th International Power Electronics and Motion Control Conference. Vol. 2, 2012, pp. 1015–1019.
확장 기능
버전 내역
R2017b에 개발됨