Low-Pass Filter (Discrete or Continuous)
이산시간 저역통과 필터 또는 연속시간 저역통과 필터

라이브러리:
Simscape /
Electrical /
Control /
General Control
설명
Low-Pass Filter (Discrete or Continuous) 블록은 IEEE 421.5-2016[1]을 준수하는 저역통과 필터를 구현합니다. 이 표준에서는 필터를 단순 시정수라고 부릅니다.
샘플 시간 파라미터를 사용하여 적분기의 연속 구현과 이산 구현 간에 전환할 수 있습니다.
시정수를 외부 입력으로 갖는 블록 버전은 Low-Pass Filter (Variable Time Constant, Discrete or Continuous) 블록을 참조하십시오.
방정식
연속시간에 대한 필터를 구성하려면 샘플 시간 속성을 0으로 설정합니다. 다음 표현은 연속 전달 함수와 동일합니다.
여기서 각각은 다음과 같습니다.
K는 필터 이득입니다.
T는 필터 시정수입니다.
위의 전달 함수에서 필터 정의 방정식은 다음과 같습니다.
여기서 각각은 다음과 같습니다.
u는 필터 입력입니다.
x는 필터 상태입니다.
y는 필터 출력입니다.
t는 시뮬레이션 시간입니다.
u0은 블록에 대한 초기 입력입니다.
이산시간에 대한 필터를 구성하려면 샘플 시간 속성을 0이 아닌 양의 값으로 설정하거나, 또는 -1로 설정하여 업스트림 블록에서 샘플 시간을 상속합니다. 다음 이산 표현은 전달 함수와 동일합니다.
여기서 각각은 다음과 같습니다.
K는 필터 이득입니다.
T는 필터 시정수입니다.
Ts는 필터 샘플 시간입니다.
이산 전달 함수에서 필터 방정식은 순방향 오일러 방법을 사용하여 정의됩니다.
여기서 각각은 다음과 같습니다.
u는 필터 입력입니다.
x는 필터 상태입니다.
y는 필터 출력입니다.
n은 시뮬레이션 시간 스텝입니다.
u0은 블록에 대한 초기 입력입니다.
초기 조건
이 블록의 초기 조건을 지정하려면 초기화를 다음과 같이 설정합니다.
블록 입력에서 상속됨— 블록은 상태 초기 조건과 출력 초기 조건을 초기 입력으로 설정합니다.파라미터로 지정— 블록은 상태 초기 조건을 초기 상태의 값으로 설정합니다.
적분 제한
포화 상한 파라미터와 포화 하한 파라미터를 설정하여 안티와인드업 포화 방법을 사용합니다.
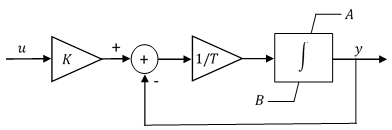
안티와인드업 방법은 적분기 상태를 포화 하한 A와 포화 상한 B 사이로 제한합니다.
적분기 상태가 제한되므로, 적분이 포화되면 출력이 입력 부호의 반전에 즉시 응답할 수 있습니다. 다음 블록 다이어그램은 필터의 안티와인드업 포화 구현을 나타낸 것입니다.
이 블록은 와인드업 포화 방법을 제공하지 않습니다. 와인드업 포화 방법을 사용하려면 포화 상한 파라미터를 inf로 설정하고 포화 하한 파라미터를 -inf로 설정하여 saturation 블록을 출력에 연결하십시오.
필터 동특성 우회
시정수를 샘플 시간보다 작거나 같은 값으로 설정하여 필터의 동특성을 무시합니다. 무시되면, 블록은 이득이 스케일링된 입력을 직접 출력에 공급합니다.
연속인 경우, 샘플 시간과 시정수는 모두 0이어야 합니다.
예제

전기 엔진 다이노
이 예제에서는 전기차 동력계 테스트를 모델링하는 방법을 보여줍니다. 테스트 환경에는 기계 샤프트를 통해 연이어 연결된 비동기기(ASM)와 매립형 영구 자석 동기기(IPMSM)가 포함되어 있습니다. 고전압 배터리가 제어된 3상 컨버터를 통해 이 두 머신에 전력을 공급합니다. 164kW ASM은 부하 토크를 생성합니다. 35kW IPMSM은 테스트 대상 전기 기기입니다. Control Machine Under Test(IPMSM) 서브시스템은 IPMSM의 토크를 제어합니다. 제어기는 멀티레이트 PI 기반 제어 구조를 포함하고 있습니다. 개루프 토크 제어의 속도는 폐루프 전류 제어의 속도보다 느립니다. 제어기에 대한 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. Control Load Machine(ASM) 서브시스템은 싱글레이트를 사용하여 ASM의 속도를 제어합니다. Visualization 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.

센서 제어가 포함된 3상 비동기 드라이브
이 예제에서는 센서 회전자 자속 기준 제어를 사용하여 ASM(비동기기)의 작동을 제어하고 분석하는 방법을 보여줍니다. 이 모델은 기본 전기 회로를 보여주며, 여기에는 제어, 측정, 스코프를 포함하는 3개의 추가 서브시스템이 있습니다. 제어 서브시스템은 2개의 제어기를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 머신 측 컨버터(DC/AC)를 위한 것입니다. Scopes 서브시스템은 2개의 시간 스코프를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 ASM을 위한 것입니다. 모델이 실행될 때 스펙트럼 분석기가 열려 A상 공급 전류에 대한 주파수 데이터가 표시됩니다.

센서리스 제어가 포함된 3상 비동기 드라이브
이 예제에서는 센서리스 회전자 자속 기준 제어를 사용하여 비동기기(ASM)의 작동을 제어하고 분석하는 방법을 보여줍니다. 이 모델은 기본 전기 회로를 보여주며, 여기에는 제어, 측정, 스코프를 포함하는 3개의 추가 서브시스템이 있습니다. 제어 서브시스템은 2개의 제어기를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 머신 측 컨버터(DC/AC)를 위한 것입니다. Scopes 서브시스템은 2개의 시간 스코프를 포함하며, 하나는 그리드 측 컨버터(AC/DC)를 위한 것이고 다른 하나는 ASM을 위한 것입니다. 모델이 실행될 때 스펙트럼 분석기가 열려 A상 공급 전류에 대한 주파수 데이터가 표시됩니다.
포트
입력
출력
파라미터
참고 문헌
[1] IEEE Recommended Practice for Excitation System Models for Power System Stability Studies. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
확장 기능
버전 내역
R2017b에 개발됨