Induction Machine Direct Torque Control
유도기 DTC
라이브러리:
Simscape /
Electrical /
Control /
Induction Machine Control
설명
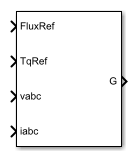
Induction Machine Direct Torque Control 블록은 유도기의 직접 토크 제어(DTC) 구조를 구현합니다. 다음 그림은 블록의 등가 회로를 보여줍니다.

방정식
토크와 플럭스를 추정하기 위해 Induction Machine Direct Torque Control 블록은 역방향 오일러 방법을 사용하여 고정자 ɑβ 기준 프레임에서 머신 전압 방정식을 이산화합니다. ɑβ 프레임에서 고정자 플럭스에 대한 이산시간 방정식은 다음과 같습니다.
및
여기서 각각은 다음과 같습니다.
vɑ는 ɑ축 전압입니다.
iɑ는 ɑ축 전류입니다.
Rs는 고정자 저항입니다.
Ψɑ는 ɑ축 고정자 플럭스입니다.
vβ는 β축 전압입니다.
iβ는 β축 전류입니다.
Ψβ는 β축 고정자 플럭스입니다.
이 블록은 토크와 플럭스를 다음과 같이 계산합니다.
및
여기서 각각은 다음과 같습니다.
p는 극쌍 개수입니다.
Ψs는 고정자 플럭스입니다.
이 블록은 플럭스 및 토크 추정 오차를 감지하기 위해 히스테리시스 비교기를 사용합니다. 아래 그림은 히스테리시스 비교기 및 이와 관련된 스위칭 섹터를 보여줍니다.

다음 표에는 인버터 High 측 시스템에 대한 최적 스위칭이 나와 있습니다.
| cΨ, cTS(θ) | S0 | S1 | S2 | S3 | S4 | S5 | |
|---|---|---|---|---|---|---|---|
| cΨ = 1 | cT = 1 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 |
| cT = 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | |
| cT = -1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | |
| cΨ = 0 | cT = 1 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 |
| cT = 0 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | |
| cT = -1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | |
가정 및 제한 사항
전력 인버터의 불감 시간은 고려되지 않습니다. 하드웨어 구현 시에는 불감 시간을 외부에서 추가해야 합니다.
예제
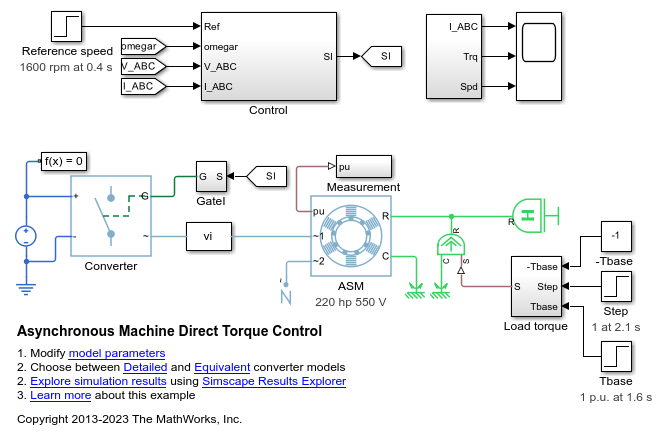
비동기기 직접 토크 제어
이 예제에서는 직접 토크 제어 방법을 사용하여 비동기기(ASM: Asynchronous Machine)를 제어하는 방법을 보여줍니다. PI 기반 속도 제어기는 토크 기준을 제공합니다. 직접 토크 제어기는 인버터 펄스를 생성합니다.
포트
입력
출력
파라미터
참고 문헌
[1] Takahashi, I., and T. Noguchi. "A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor." IEEE Transactions on Industry Applications. Vol. IA-22, Number 5, 1986, pp. 820 - 827.
확장 기능
버전 내역
R2017b에 개발됨
참고 항목
블록
- Induction Machine Current Controller | Induction Machine Direct Torque Control (Single-Phase) | Induction Machine Direct Torque Control with Space Vector Modulator | Induction Machine Field-Oriented Control | Induction Machine Field-Oriented Control (Single-Phase) | Induction Machine Flux Observer | Induction Machine Scalar Control