PWM
입력 듀티 사이클에 대응되는 이상적인 펄스 폭 변조 신호 생성

라이브러리:
Simulink /
Discontinuities
설명
PWM 블록을 사용하여 이상적인 펄스 폭 변조 신호를 생성합니다.
펄스 폭 변조(PWM)는 구형파를 사용하여 아날로그 신호를 인코딩하는 기법입니다. 이 인코딩은 구형파의 한 주기에서 높은 상태로 설정된 비율을 제어하여 이루어집니다. 이 비율이 PWM 신호의 듀티 사이클입니다. 변조 신호와 입력 듀티 사이클 간의 관계는 간단히 다음과 같이 설명될 수 있습니다.
여기서 ymax와 ymin은 각각 출력 신호의 상한과 하한입니다. PWM 블록의 경우 듀티 사이클은 [0,1]로 제한됩니다. 이상적인 PWM 신호는 듀티 사이클 D에 비례합니다.
예제
이 예제에서는 Simulink®에서 PWM 블록을 사용하여 부스트 컨버터를 제어하는 방법을 보여줍니다. 이 모델의 부스트 컨버터는 Simscape™ Electrical™ 라이브러리에 있는 Boost Converter (Simscape Electrical) 블록을 사용합니다.
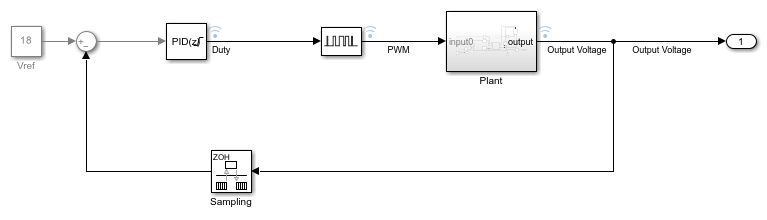
PWM 신호는 부스트 컨버터의 스위칭 소자(게이트)를 제어하는 데 사용됩니다. PID 제어기는 원하는 승압 전압(Vref) 18V를 추종하기 위해 명령 신호(듀티 사이클)를 생성합니다.
이는 비교적 높은 주파수를 응용한 사례로, 스위칭 게이트가 약 200kHz에서 작동합니다. 따라서 PWM 신호의 펄스 주기는 1/200,000(5e-6초)로 선택됩니다.
작은 시간 스텝을 고려하여, 예제와 함께 제공된 boostconverter_pwm 모델은 0.069초에서의 정상 상태로 로드됩니다.
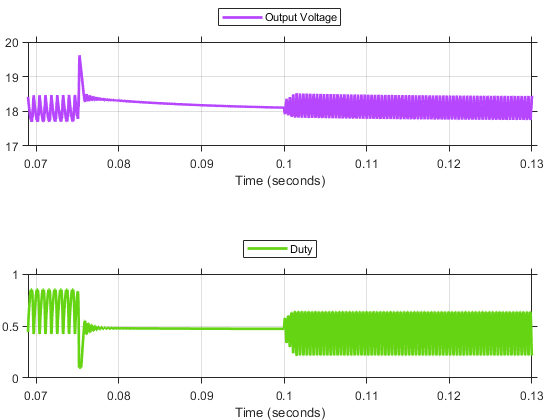
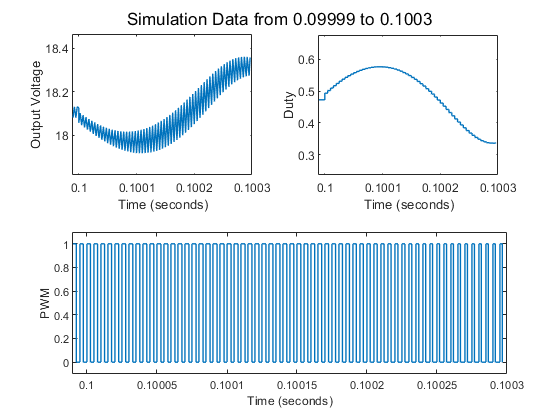
0.1초 눈금 부근에서 부스트 컨버터 동작의 시각화는 다음과 같습니다.
PWM 제어의 다른 물리 모델링 구현은 펄스 폭 변조 (Simscape Electrical) 항목을 참조하십시오.
포트
입력
출력
파라미터
블록 특성
데이터형 |
|
직접 피드스루 |
|
다차원 신호 |
|
가변 크기 신호 |
|
영점교차 검출 |
|
알고리즘
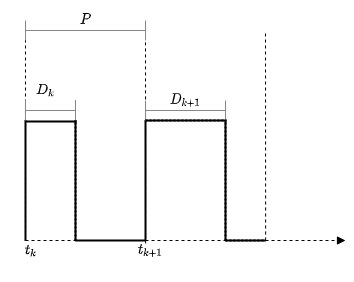
시간 tk에서 시작하는 펄스는 다음과 같이 정의됩니다.
여기서 pw는 펄스 폭입니다. 주어진 주기 P에서 pw는 듀티 사이클 D에 비례합니다.
이산 샘플링 모드에서 입력 듀티 사이클 신호는 고정 시간 간격으로 실행 파라미터에 의해 지정된 레이트로 샘플링됩니다.
지정된 샘플링 레이트 tS 에 대해, 펄스 폭 pw에 필요한 샘플 개수는 다음과 같이 표현할 수 있습니다.
여기서 nP는 주기 P의 펄스를 시뮬레이션하는 데 필요한 샘플 개수입니다.
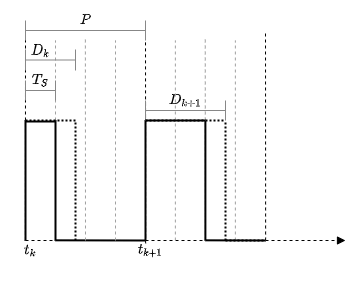
블록의 샘플링 레이트가 tS= 0.25 P로 설정된 주기 P의 공칭 펄스를 고려해 보십시오. 펄스의 한 주기에 필요한 샘플 개수는 nP= 4입니다. 그러므로 입력 듀티 사이클 D= 0.47 의 경우 샘플 개수 n pw는 = 1로 내림됩니다. 이에 따라 해당 주기의 4개 샘플 중 1개에 대해 펄스가 높습니다.
확장 기능
버전 내역
R2020b에 개발됨