이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
역진자 제어기 조정
이 예제에서는 Simulink® Design Optimization™을 사용하여 역진자의 제어기를 최적화하는 방법을 보여줍니다. 역진자는 카트 위에 있으며 카트의 움직임은 제어됩니다. 진자 각도 변동을 제한하고 카트 위치의 계단 변화에 최적으로 응답하기 위해 제어기의 비례 이득, 피드포워드 이득, LQR 이득이 조정됩니다.
아래 명령을 사용하여 pendulum_demo 모델을 열고 시뮬레이션을 실행합니다. 시뮬레이션은 역진자의 최적화되지 않은 위치와 각도, 그리고 최적화를 위한 초기 데이터를 생성합니다. 애니메이션 창은 카트 위치와 역진자 각도를 표시합니다.
open_system('pendulum_demo')
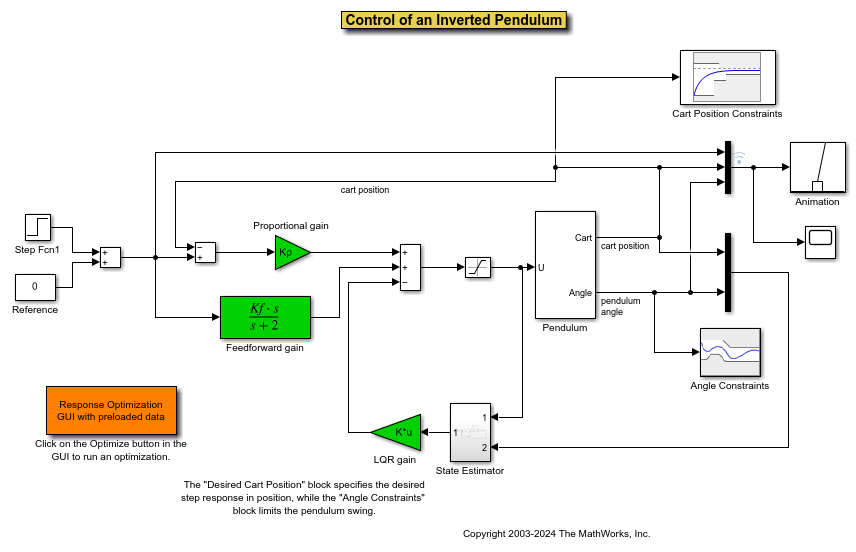
역진자의 카트 위치에 대한 제약 조건을 보려면 Desired Cart Position 블록을 더블 클릭합니다.
역진자의 각도에 대한 제약 조건을 보려면 Angle Constraints 블록을 더블 클릭합니다.
Simulink에서 방정식이 어떻게 도출되고 구현되는지에 대한 자세한 설명은 운동 방정식 도출 및 카트-폴 시스템 시뮬레이션 예제의 Simulink의 카트-폴 시스템 예제 섹션을 참조하십시오.
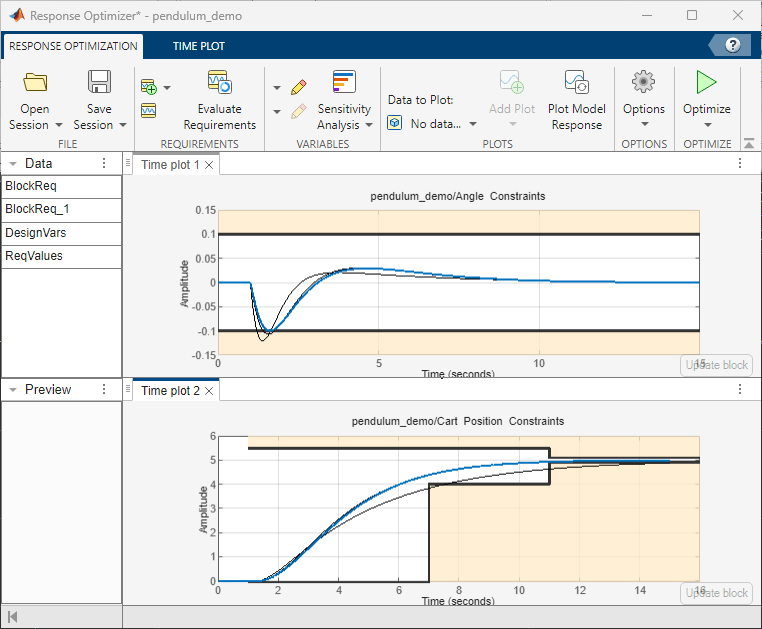
Simulink 툴스트립의 앱 메뉴 또는 MATLAB®의 sdotool 명령을 사용하여 응답 최적화기를 실행할 수 있습니다. 먼저 모델을 열고 모델의 아래쪽에 있는 주황색 블록을 더블 클릭하여 응답 최적화기에서 사전 구성된 최적화 작업을 실행할 수 있습니다. 응답 최적화기에서 모델 응답 플로팅 버튼을 눌러 모델을 시뮬레이션하고 초기 설계가 설계 요구 사항을 얼마나 잘 충족하는지 표시합니다.
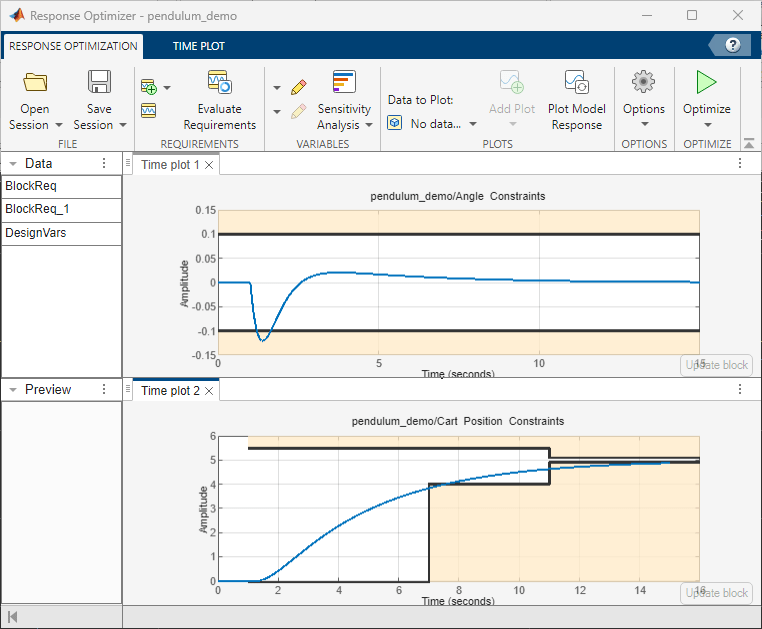
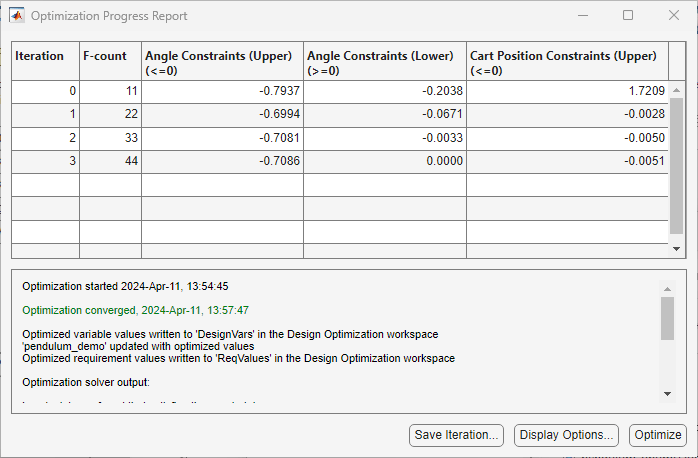
응답 최적화기에서 최적화 버튼을 눌러 최적화를 시작합니다. 플롯이 업데이트되어 설계 요구 사항이 이제 충족되었음을 나타냅니다.