간단한 모델 만들기
Simulink®를 사용하여 시스템을 모델링한 후 이 시스템의 역학적 동작을 시뮬레이션할 수 있습니다. 이 예제에서는 간단한 모델을 생성하지만, 동일한 기본 기법을 사용해 복잡한 모델을 생성할 수도 있습니다. 이 예제에서는 자동차의 단순화된 움직임을 시뮬레이션합니다. 자동차는 일반적으로 가속 페달을 누르고 있는 동안 움직입니다. 페달을 놓으면 자동차의 속도가 줄어들면서 정지되고 공회전 상태가 됩니다.
Simulink 블록은 입력과 출력 간의 수학적 관계를 정의하는 모델 요소입니다. 이러한 간단한 모델을 만들려면 4개의 Simulink 블록이 필요합니다.
| 블록 이름 | 블록 용도 | 모델 용도 |
|---|---|---|
| Pulse Generator | 모델의 입력 신호 생성. | 가속 페달을 표현. |
| Gain | 입력 신호에 상수 값 곱하기. | 가속 페달을 누르는 것이 자동차 가속에 어떻게 영향을 미치는지를 계산. |
| Second-Order Integrator | 입력 신호를 두 번 적분. | 가속으로 인한 위치 구하기. |
| Outport | 신호를 모델의 출력으로 지정. | 구한 위치를 모델의 출력으로 지정. |

이 모델의 시뮬레이션에서는 짧은 펄스를 두 번 적분하여 램프를 구합니다. 입력 펄스는 가속 페달의 누름 상태를 나타냅니다. 가속 페달을 누른 경우 1이고 누르지 않은 경우 0입니다. 출력 램프는 시작점에서 증가하는 거리입니다.
새 모델 열기
Simulink 편집기를 사용하여 모델을 생성합니다.
MATLAB®을 시작합니다. MATLAB 툴스트립에서 Simulink 버튼
 을 클릭합니다.
을 클릭합니다.
빈 모델 템플릿을 선택합니다.
Simulink 편집기가 열립니다.
가려짐을 방지하거나 이름이 같은 두 개 이상의 모델이 한꺼번에 열리는 것을 방지하기 위해, Simulink 편집기는 불러온 모델과 경로상의 파일을 확인하고 다음으로 사용 가능한 이름
untitled,untitled1,untitled2등으로 모델을 생성합니다.
시뮬레이션 탭에서 저장 > 다른 이름으로 저장을 선택합니다. 파일 이름 텍스트 상자에서 모델의 이름을 입력합니다(예:
simple_model). 저장을 클릭합니다. 파일 확장자.slx로 모델이 저장됩니다.
Simulink 라이브러리 브라우저 열기
Simulink는 라이브러리 브라우저에서 기능별로 구성된 블록 라이브러리 세트를 제공합니다. 대부분의 워크플로에 공통으로 사용되는 라이브러리는 다음과 같습니다.
Continuous — 연속 상태를 갖는 시스템을 위한 블록
Discrete — 이산 상태를 갖는 시스템을 위한 블록
Math Operations — 대수 방정식 및 논리 방정식을 구현하는 블록
Sinks — 자신에게 연결되는 신호를 저장하고 표시하는 블록
Sources — 모델을 구동하는 신호 값을 생성하는 블록
라이브러리 브라우저를 열려면 Simulink 툴스트립의 시뮬레이션 탭에서 라이브러리 브라우저를 클릭하십시오.

블록 라이브러리를 탐색하려면 라이브러리 트리에서 라이브러리와 해당 하위 라이브러리를 확장하십시오.
사용 가능한 블록 라이브러리를 모두 검색하려면 검색어를 입력하십시오. 예를 들어, Pulse Generator 블록을 찾는다고 가정해 보겠습니다. 검색 상자에 pulse를 입력한 후 Enter 키를 누릅니다. 라이브러리에서 이름 또는 설명에 pulse가 있는 블록이 검색되며 라이브러리 브라우저의 검색 결과 탭에 블록이 표시됩니다. 라이브러리 탭을 클릭하여 라이브러리 트리 탐색으로 돌아갈 수 있습니다.

블록을 모델에 추가하기
모델 생성을 시작하려면 모델 캔버스에 블록을 추가합니다. 라이브러리 브라우저나 빠른 삽입 메뉴를 사용하여 블록을 추가할 수 있습니다.
Pulse Generator 블록을 추가합니다. 라이브러리 브라우저 트리에서 Simulink 라이브러리를 확장합니다. Sources 하위 라이브러리를 확장합니다. Pulse Generator 블록을 모델 캔버스로 끌어서 놓습니다.

Gain 블록을 추가합니다. 모델 캔버스를 더블 클릭합니다. 표시되는 빠른 삽입 메뉴에서
gain을 입력합니다. 블록 목록이 표시됩니다.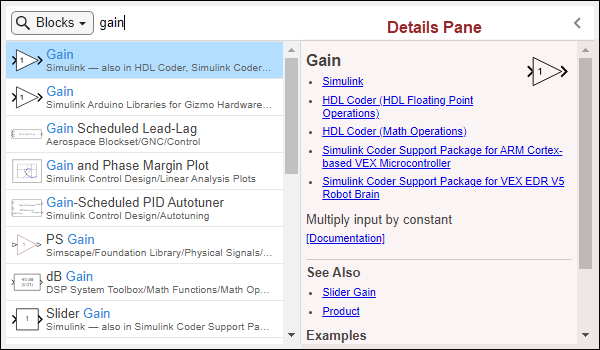
여러 다른 블록이 서로 다른 라이브러리 파일에 저장된 경우 동일한 이름을 가질 수 있습니다. 블록 이름 아래에 해당 블록이 속한 라이브러리가 표시됩니다. Simulink 라이브러리에서 Gain 블록이 선택되었는지 확인하십시오. 선택되지 않은 경우 화살표 키를 사용하거나 블록 이름을 클릭하여 블록을 선택하십시오.
선택한 블록에 대해 알아보려면 검색 결과 오른쪽에 있는 세부 정보 창에서 관련 설명을 읽어봅니다. 블록에 대한 전체 문서를 보려면 문서를 클릭합니다. 해당 블록과 관련된 예제를 보려면 예제 아래의 링크를 클릭합니다. 세부 정보 창을 숨기거나 숨김 해제하려면 오른쪽 위에 있는 화살표
 를 클릭합니다.
를 클릭합니다.Enter 키를 누르거나 선택한 블록을 더블 클릭하여 모델에 추가합니다.

다음 블록을 라이브러리 브라우저나 빠른 삽입 메뉴를 사용하여 모델에 추가합니다.
블록 라이브러리 Out1 Simulink 라이브러리, Sinks 하위 라이브러리 Second-Order Integrator Simulink 라이브러리, Continuous 하위 라이브러리 기존 Out1 블록을 복사하고 바로 가기 키 Ctrl+C 및 Ctrl+V(macOS에서는 command+C 및 command+V)를 사용하여 다른 지점에 붙여 넣는 방식으로 두 번째 블록을 추가합니다. 이제 모델에 필요한 블록들이 준비되었습니다.
블록 연결하기
다음과 같이 연결합니다.
Pulse Generator 블록을 Gain 블록에 연결.
Gain 블록을 Second-Order Integrator 블록에 연결.
Second-Order Integrator 블록을 두 개의 Out1 블록에 연결.
예를 들어 Pulse Generator 블록을 Gain 블록에 연결하려면 다음과 같이 하십시오.
Pulse Generator 블록의 오른쪽에 있는 출력 포트를 클릭합니다.
이 출력 포트 및 연결하기에 적합한 모든 입력 포트가 파란색 갈매기 모양 기호(>)로 표시됩니다.
연결 큐를 확인하기 위해 갈매기 모양 기호(>)를 가리킵니다.
큐를 클릭하여 신호 흐름의 방향을 나타내는 선과 화살표로 블록을 연결합니다.
블록을 연결하는 방법에 대한 자세한 내용은 블록 연결하기 항목을 참조하십시오.
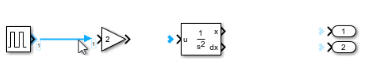
블록을 연결했으면 각 블록을 끌어서 놓아 Pulse Generator 블록, Gain 블록, Second-Order Integrator 블록을 일렬로 정렬합니다. 블록의 크기를 변경하려면 블록의 코너를 끌어서 놓으십시오.
대규모 모델의 경우 각 블록을 끌어서 놓는 방법 대신 자동 정렬을 사용하여 모델 레이아웃을 개선할 수 있습니다. 모델 캔버스를 마우스 오른쪽 버튼으로 클릭합니다. 최상위 모델 상황별 메뉴가 표시됩니다. Simulink 상황별 메뉴에서는 형식 지정 옵션(예: 색이나 글꼴 변경 또는 모델 자동 정렬)이 형식 막대에 있습니다. 형식 막대를 확장하려면 메뉴 상단에서 화살표 ![]() 를 클릭하십시오. 그런 다음 자동 정렬 버튼
를 클릭하십시오. 그런 다음 자동 정렬 버튼  을 클릭합니다.
을 클릭합니다.

팁
상황별 메뉴 버튼을 누를 경우 수행할 수 있는 동작을 설명하는 툴팁을 보려면 해당 버튼 아이콘에 마우스 포인터를 올려놓습니다.
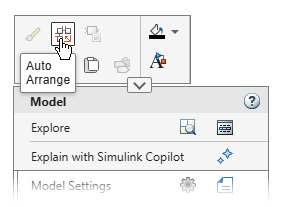
자동 정렬을 사용하면 블록이 정렬되고 신호 선이 일자로 펴집니다.

블록 파라미터 값 편집하기
블록에는 사용자가 수정할 수 있는 파라미터 값이 있습니다. 블록에 대해 수정할 수 있는 파라미터와 파라미터가 가질 수 있는 값 유형을 확인하려면 관련 블록 문서를 여십시오. 블록을 마우스 오른쪽 버튼으로 클릭하고 상황별 메뉴의 오른쪽 위 코너에서 도움말 문서 열기 버튼  을 클릭합니다.
을 클릭합니다.
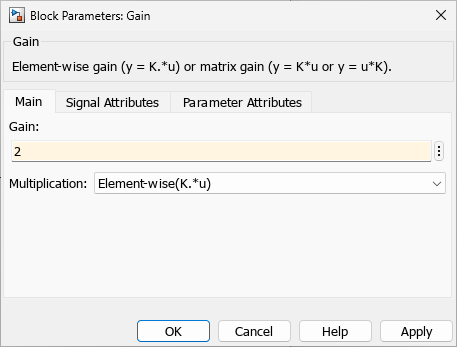
Constant 블록 또는 Gain 블록 같은 일부 블록에서는 블록에서 바로 파라미터 값을 변경할 수 있습니다. 예제 모델의 Gain 블록 이득 값을 2로 변경합니다. 블록을 선택하고 블록에서 값을 클릭한 다음 새 값을 입력하고 Enter 키를 누릅니다.
블록 파라미터 대화 상자에서도 이득 값을 변경할 수 있습니다. 블록 파라미터 대화 상자를 열려면 블록을 더블 클릭합니다. 또는 블록을 마우스 오른쪽 버튼으로 클릭한 다음 블록 파라미터 버튼  을 클릭합니다. 열린 대화 상자에서 이득 값을
을 클릭합니다. 열린 대화 상자에서 이득 값을 2로 변경한 다음 Enter 키를 누릅니다.
세 번째 옵션은 속성 인스펙터를 사용하는 것입니다. Gain 블록을 선택합니다. 속성 인스펙터를 열려면 Ctrl+Shift+I를 누릅니다(macOS에서는 command+option+O). 또는 블록을 마우스 오른쪽 버튼으로 클릭한 다음 속성 인스펙터 버튼  을 클릭합니다. 속성 인스펙터의 파라미터 탭에서 이득 값을
을 클릭합니다. 속성 인스펙터의 파라미터 탭에서 이득 값을 2로 변경합니다.
블록 아이콘에 표시되지 않은 파라미터 값을 변경하려면 블록 파라미터 대화 상자 또는 속성 인스펙터를 사용하십시오. 블록 파라미터 대화 상자에 값을 변경하고자 하는 파라미터 이름이 표시되지 않으면 속성 인스펙터를 확인하십시오. 그 반대의 경우도 마찬가지입니다.
시뮬레이션 실행하기
시뮬레이션 중지 시간을 지정합니다. 그런 다음 모델을 시뮬레이션합니다.
시뮬레이션 탭에서 시뮬레이션 중지 시간을 설정합니다. Simulink 툴스트립의 시뮬레이션 탭에서 중지 시간 텍스트 상자에 값을 입력합니다.

디폴트 중지 시간
10.0은 이 모델에 적합합니다. 이 시간 값에는 단위가 없습니다. Simulink 시뮬레이션에서 시간 단위는 방정식이 생성된 방식에 따라 달라집니다. 이 예제에서는 자동차의 단순화된 움직임을 10초 동안 시뮬레이션합니다. 하지만 다른 모델에서는 시간 단위가 밀리초 또는 연 단위일 수 있습니다.모델을 시뮬레이션하려면 Ctrl+T를 누릅니다(macOS에서는 command+T). 또는 툴스트립의 시뮬레이션 탭에서 실행
 을 클릭합니다.
을 클릭합니다.
시뮬레이션 데이터 보기
시뮬레이션 데이터 인스펙터에서 시뮬레이션 결과를 보려면 신호 선 중 하나를 마우스 오른쪽 버튼으로 클릭한 다음 데이터 인스펙터에서 보기 버튼  을 클릭합니다.
을 클릭합니다.
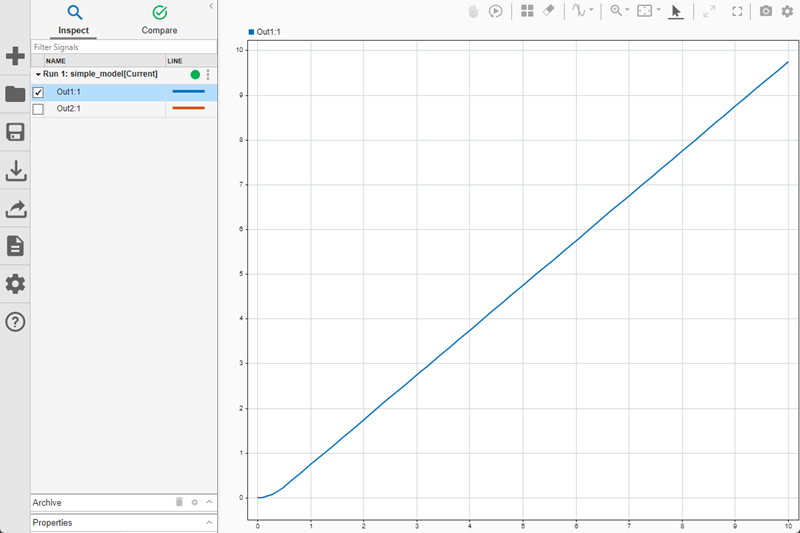
시뮬레이션 데이터 인스펙터에서 데이터를 플로팅하려면 왼쪽의 검사 목록에서 신호를 선택합니다. 예를 들어 자동차의 위치를 플로팅하려면 Out1:1이라는 신호를 선택합니다.
모델 미세 조정하기
블록 파라미터를 변경하고 새 블록을 추가하며 새 연결을 만들고 신호 선에 주석을 달아서 모델을 세부적으로 조정할 수 있습니다.
블록 파라미터 변경하기
이 예제에서는 이름이 moving_car인 기존 모션 모델을 기반으로 근접 센서를 모델링합니다.
이 시나리오에서는 디지털 센서가 자동차와 초기에 10m(30ft) 떨어져 있는 장애물 간의 거리를 측정합니다. 모델은 다음 조건을 고려하여 센서 측정값과 자동차의 위치를 출력합니다.
자동차는 장애물에 도달하면 강제 정지(hard stop)한다.
실제 환경에서는 센서가 거리를 부정확하게 측정하여 수치적 랜덤 오차가 발생한다.
디지털 센서는 고정 시간 간격으로 작동한다.
moving_car 모델을 엽니다.
open_system("moving_car.slx");첫 번째로 자동차 위치가 10에 도달하면 발생하는 강제 정지를 모델링해야 합니다. Integrator, Second-Order 블록에 이러한 용도의 파라미터가 있습니다.
Integrator, Second-Order 블록을 더블 클릭합니다. 블록 파라미터 대화 상자가 나타납니다.
x 제한을 선택하고 x의 상한에
10을 입력합니다. 파라미터의 배경색이 변경되어 모델에 적용되지 않은 수정 사항임을 나타냅니다. 확인을 클릭하여 변경 사항을 적용하고 대화 상자를 닫습니다.
새 블록 및 연결 추가하기
장애물로부터의 거리를 측정하는 센서를 추가하기 위해 모델을 수정합니다. 필요한 경우 새 블록을 수용하도록 모델 창을 확장합니다.
차량 위치와 장애물 위치 간의 거리를 구하려면 Sources 라이브러리에 있는 Constant 블록을 추가하고 블록의 값을
10으로 설정합니다. 장애물 위치와 차량 위치 간의 거리를 구하려면 Math Operations 라이브러리에서 Subtract 블록을 추가하십시오.실제 센서의 불완전한 측정값을 시뮬레이션하려면 Sources 라이브러리에 있는 Band-Limited White Noise 블록을 사용하여 잡음을 모델에 추가합니다. 블록을 더블 클릭하여 잡음 전력 파라미터를
0.001로 설정합니다. Math Operations 라이브러리에 있는 Add 블록을 사용하여 거리 측정값에 잡음을 더합니다.Simulink에서 주어진 간격으로 신호를 샘플링하려면 샘플 앤 홀드를 수행해야 합니다. Discrete 라이브러리에서 Zero-Order Hold 블록을 추가합니다. 그런 다음 블록을 더블 클릭하여 샘플 시간 파라미터를
0.1로 변경합니다.센서 출력을 기록하려면 Zero-Order Hold 블록을 또 다른 Outport 블록에 연결합니다.
새 블록들을 연결합니다. Second-Order Integrator 블록의 출력이 이미 다른 포트에 연결되어 있습니다. 해당 신호의 분기를 만들려면 신호를 마우스 왼쪽 버튼으로 클릭하여 연결 가능한 포트가 강조 표시되도록 한 다음, 적절한 포트를 클릭하십시오.

신호에 주석 달기
신호 이름을 모델에 추가합니다.
신호를 더블 클릭하고 신호 이름을 입력합니다.

입력을 마치려면 텍스트 상자 외부를 클릭합니다.
이 단계를 반복하여 아래와 같이 이름을 추가합니다.

여러 개의 신호 보기
actual distance 신호를 measured distance 신호와 비교합니다. measured distance 신호는 출력으로 기록됩니다. actual distance 신호를 기록하기 위해 이를 신호 기록으로 표시할 수 있습니다. 신호 선을 마우스 오른쪽 버튼으로 클릭한 다음, 신호 기록 버튼  을 클릭합니다. 기록 배지
을 클릭합니다. 기록 배지 ![]() 는 신호가 기록되도록 표시되었음을 나타냅니다.
는 신호가 기록되도록 표시되었음을 나타냅니다.
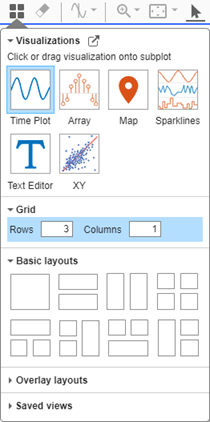
모델을 시뮬레이션합니다. 시뮬레이션 데이터 인스펙터에서 시뮬레이션 결과를 보려면, 신호 선을 마우스 오른쪽 버튼으로 클릭한 다음 데이터 인스펙터에서 보기 버튼 을 클릭합니다. 아웃포트 검사 목록과 신호 검사 목록을 확장합니다. 동일한 시간 플롯에 두 신호를 플로팅하려면 actual distance 신호와 measured distance 신호를 선택합니다.

이 플롯은 측정값이 실제 값과 0.3m까지 차이가 날 수 있다는 점을 보여줍니다. 이 정보는 충돌 경고와 같은 안전 기능을 설계할 때 유용합니다.
별도의 서브플롯에서 신호 보기
별도의 서브플롯에서 신호를 보면서 결과를 분석할 수도 있습니다. 예를 들어, pedal position 신호와 velocity 신호에 대한 서브플롯을 추가하여 페달 위치(pedal position), 자동차의 속도(velocity of the car), 자동차와 장애물 간 거리(distance between the car and the obstacle) 사이의 관계를 볼 수 있습니다.
신호 기록을 위해 pedal position 신호를 표시합니다. pedal position 신호 선을 마우스 오른쪽 버튼으로 클릭한 다음, 신호 기록 버튼 을 클릭합니다.
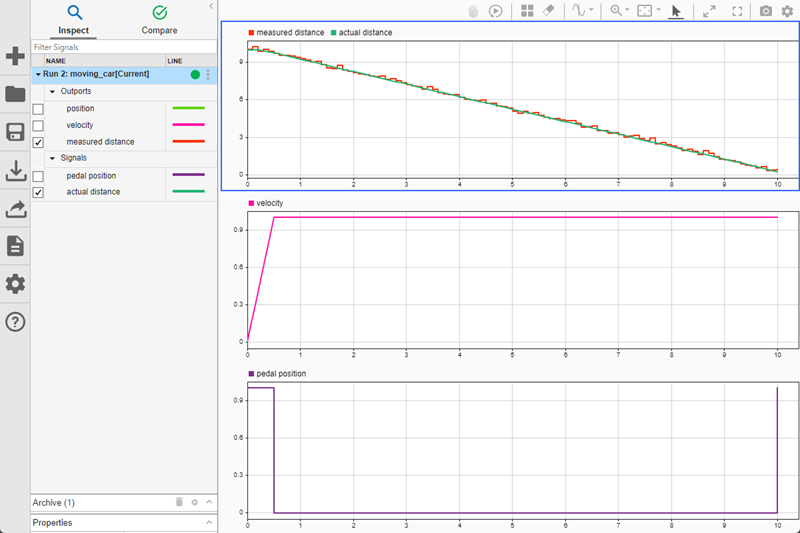
모델을 시뮬레이션합니다. 시뮬레이션이 끝나면 시뮬레이션 데이터 인스펙터에서 시각화 및 레이아웃 ![]() 을 클릭합니다. 그런 다음 그리드에서 행과 열의 개수를 지정하여
을 클릭합니다. 그런 다음 그리드에서 행과 열의 개수를 지정하여 3×1 레이아웃을 만듭니다.
velocity 신호를 가운데 서브플롯에 추가하고 pedal position 신호를 아래쪽 서브플롯에 추가합니다. 신호를 서브플롯에 추가하려면 서브플롯을 선택한 다음 신호 테이블에서 신호를 선택합니다.
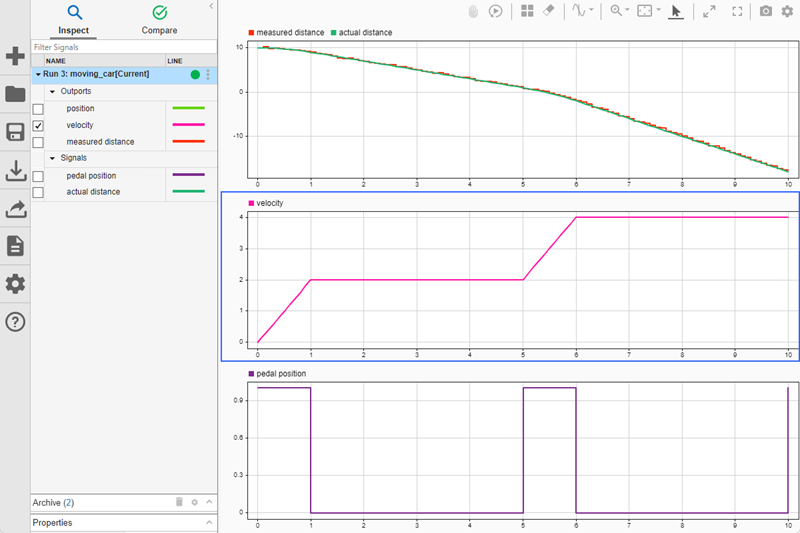
3개의 서브플롯에 데이터를 시각화하면 가속 페달 누름이 자동차의 속도와 장애물로부터의 자동차의 거리에 어떻게 영향을 미치는지 확인할 수 있습니다. 이를 더 자세히 살펴보기 위해 Pulse Generator 블록의 파라미터를 조정하여 가속 페달의 동작을 변경할 수 있습니다. Pulse Generator 블록에 대한 블록 파라미터 대화 상자를 열려면 블록을 더블 클릭합니다. 주기를 5로 설정하고 펄스 폭을 20으로 설정하여 1초 동안 두 번 가속 페달을 누르는 모델을 예로 들 수 있습니다.
모델을 시뮬레이션합니다. 시뮬레이션 데이터 인스펙터에서 스페이스바를 눌러 표시할 신호를 피팅합니다.
시뮬레이션 데이터 인스펙터에서 플롯 및 신호 모양을 사용자 지정하고, 확대/축소 및 패닝하고, 데이터 커서를 추가하여 데이터를 더 자세히 살펴볼 수 있습니다. 자세한 내용은 Create Plots Using the Simulation Data Inspector 항목을 참조하십시오.
참고 항목
블록
- Pulse Generator | Gain | Second-Order Integrator | Sum | Constant | Zero-Order Hold | Band-Limited White Noise