연결 메커니즘
이 예제는 연결 메커니즘에서 Simscape™ Lever 블록의 사용을 보여줍니다. Lever 1과 Lever 4는 받침점이 끝에 있는 제1종 레버입니다. Lever 3은 받침점이 중간에 있는 제2종 레버입니다. Lever 2는 제1종과 제3종 레버로 구동되는 합산 레버입니다.
메커니즘은 2개의 힘 소스에 의해 여기 상태가 됩니다. 한 힘 소스는 1초에 Lever 1에 갑자기 힘을 가하고, 그런 다음 다른 힘 소스가 2초에 Lever 3에 갑자기 힘을 가합니다.
모델

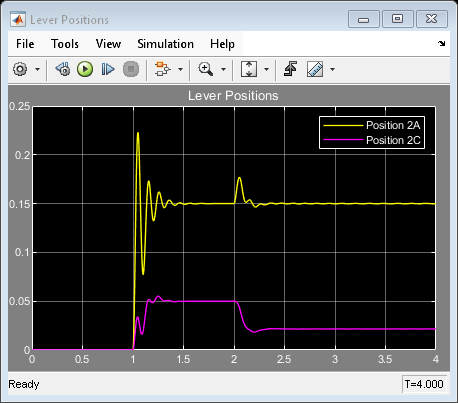
스코프의 시뮬레이션 결과