Analog Position Controller와 Dashboard 블록이 있는 유압 액추에이터
이 예제에서는 Foundation Library를 사용하여 전기, 기계, 등온 유체 도메인 전반의 시스템을 모델링하는 방법을 보여줍니다.
모델에서 등온 유체 도메인에 구현된 유압 시스템은 전압 기준 요구량에 따라 기계적 부하 위치를 제어합니다. 기준 요구량이 0이면 유압 액추에이터(및 부하) 변위는 0이고, 기준이 +5볼트이면 변위는 100mm입니다.
비례 적분 제어기는 최종 단계가 전류원으로 설정되는 op-amp를 사용하여 구현됩니다. 그러면 저항 항과 인덕턴스 항이 모델링된 토크 모터가 구동됩니다. 토크 모터는 스풀 밸브를 직접 작동하고, 스풀 밸브는 이어서 유압 램을 공급하는 메인 유압 회로를 제어합니다. 마지막으로 램은 일반 기계적 부하를 구동합니다.
이 정도 충실도의 모델은 서보 밸브 제어기의 설계와 테스트를 이상적으로 지원합니다. 이 모델에는 안정성 여유에 영향을 주는 전기기계 고주파 모드가 포함되어 있으며, 유압 장치에서 많은 요구가 발생할 경우 생길 수 있는 비선형 유량 효과도 포함되어 있습니다.
이 예제에는 Simulink / Dashboard / Customizable Blocks 라이브러리에서 Vertical Gauge 블록과 2개의 Circular Gauge 블록을 사용하여 생성된 액추에이터와 압력 게이지의 애니메이션이 포함되어 있습니다.
모델

Actuator Control Circuit 서브시스템

Spool Valve 서브시스템

Motor Control Circuit 서브시스템

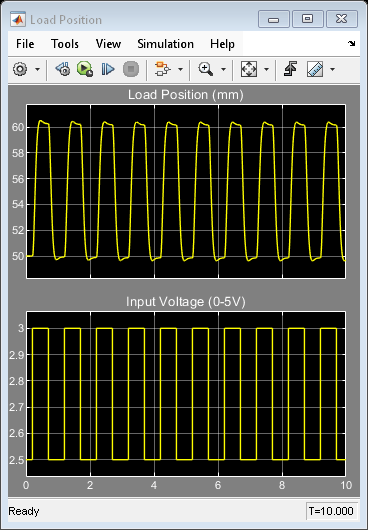
스코프의 시뮬레이션 결과
Simscape 기록의 시뮬레이션 결과
아래 그림은 MATLAB Figure에 플로팅된 실린더 압력과 부하 위치를 보여줍니다. 모델 캔버스에서 View cylinder pressures 하이퍼링크를 클릭하거나 모델 시뮬레이션 탭에서 데이터 인스펙터 버튼을 클릭하여 시뮬레이션 데이터 인스펙터에서 이 데이터를 볼 수도 있습니다.
