모델을 빌드하고 결과 시각화하기
이 예제에서는 플롯 형태의 출력을 생성하는 간단한 모델을 만들고 실행하는 방법을 보여줍니다. Simscape™ Driveline™ 블록은 회전 기계 도메인 또는 병진 기계 도메인에 속합니다. Simscape Driveline 블록을 사용하여 모델을 만들고, 블록을 파라미터화하여 모델 기능을 변경한 후, 결과를 시각화합니다. 그런 다음 센서 블록을 사용하여 물리적 데이터를 시각화합니다.
이 예제에서는 회전 기계 도메인의 블록을 사용하지만, 이 예제에 설명된 원리를 적용하여 병진 시스템 모델을 만들 수 있습니다. 단순하거나 이상적인 입력과 물리적 특성부터 시작하여 블록이 예상대로 동작하는지 검증한 후에, 해당 블록을 보다 복잡한 모델에 추가할 수 있습니다. 블록은 시스템 입력값을 사용해 계산을 수행하여 해당 블록의 물리적 특성을 나타냅니다. 블록 수식과 파라미터에 대해 자세히 알아보려면 블록의 도움말 페이지를 참조하십시오.
회전 기계 모델 빌드하기
회전 기계 도메인에서 모델링에 유용한 블록과 링크가 포함된 Simulink® 캔버스를 열 수 있습니다. MATLAB® 창에서 Simulink 버튼을 클릭하여 Simulink 시작 페이지를 엽니다. 새로 만들기 탭에서 Simscape로 이동한 후 회전 기계의 모델 만들기를 클릭합니다. 병진 기계 도메인과 회전 기계 도메인은 각각 고유한 기준점 블록을 가집니다. 이 모델에서 Mechanical Rotational Reference 블록은 운동과 방향이 0인 점을 정의합니다. Simscape는 이 기준 프레임을 중심으로 연결된 블록들을 정의합니다.
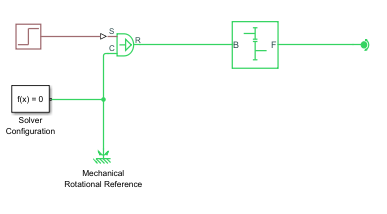
캔버스에는 Solver Configuration 블록에 연결된 Mechanical Rotational Reference 블록이 포함되어 있습니다. 캔버스를 더블 클릭하고 다음과 같은 Simscape 블록과 Simscape Driveline 블록을 모델에 추가하십시오.
다음 단계에 따라 모델을 빌드하십시오.
Ideal Angular Velocity Source 블록의 포트 C를 Mechanical Rotational Reference 블록에 연결합니다.
Ideal Angular Velocity Source 블록의 포트 R을 Simple Gear 블록의 포트 B에 연결합니다.
PS Step 블록을 Ideal Angular Velocity Source의 포트 S에 연결합니다. 그런 다음 PS Step 블록을 더블 클릭하고 최종 값을
10으로 설정합니다.Simple Gear 블록의 포트 F를 Rotational Free End 블록에 연결합니다.
Simulink-PS Converter 블록을 삭제합니다. PS-Simulink 블록과 Scope 블록은 나중에 사용할 때까지 모델에 연결되지 않은 상태로 두어도 됩니다.
캔버스에서 블록을 마우스 오른쪽 버튼으로 클릭하고 형식 > 시계 방향으로 회전을 선택하거나 CTRL+R을 눌러 블록을 회전할 수 있습니다. 모델 캔버스와 상호 작용하는 방법에 대한 자세한 내용은 Configure Model Layout 항목을 참조하십시오. 모델을 myModel로 저장합니다.
이 모델은 마찰, 질량 또는 동적 힘이 없는 이상적인 모델이므로, Ideal Angular Velocity Source 블록은 시스템을 정상 상태로 만들기 위해 토크를 필요로 하지 않습니다.
Simple Gear 블록은 기본적으로 팔로워 대 베이스 비율이 2:1입니다. 감속비를 변경하기 위해, 블록을 더블 클릭하고 팔로워(F) 대 베이스(B) 톱니비(NF/NB)를 3으로 설정합니다.
센서 블록을 사용하여 데이터를 Scope 블록으로 출력하기
센서 블록을 사용하여 하나 이상의 모델 변수를 추적할 수 있으며, Scope 블록을 사용해 센서 데이터를 시각화할 수 있습니다. 센서 블록은 이상적이며 모델에 물리적으로 영향을 미치지 않습니다. Simscape Foundation Library에는 다음과 같은 병진 및 회전 센서 블록이 있습니다.
Translational Power Sensor
Rotational Power Sensor
Ideal Translational Motion Sensor
Ideal Rotational Motion Sensor
Ideal Force Sensor
Ideal Torque Sensor
Simple Gear 블록의 출력 샤프트 속도를 보기 위해, 그림에 표시된 것처럼 Ideal Rotational Motion Sensor 블록과 Scope 블록을 모델에 연결합니다. 센서 블록은 물리 신호를 출력하므로, Scope 블록과 Ideal Rotational Motion Sensor 블록의 포트 W 사이에 PS-Simulink Converter 블록을 사용해야 합니다. Ideal Rotational Motion Sensor 블록을 더블 클릭하고 측정 기준을 절대로 설정하십시오. Simple Gear 블록과 Rotational Free End 블록 사이의 신호를 분기하여 센서의 포트 R에 연결합니다.
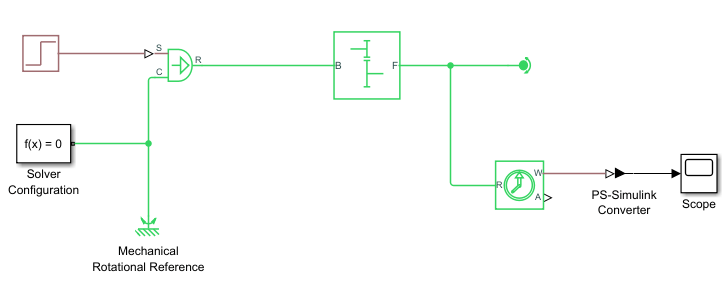
Scope 블록에서 모델을 실행하여 결과를 생성합니다.
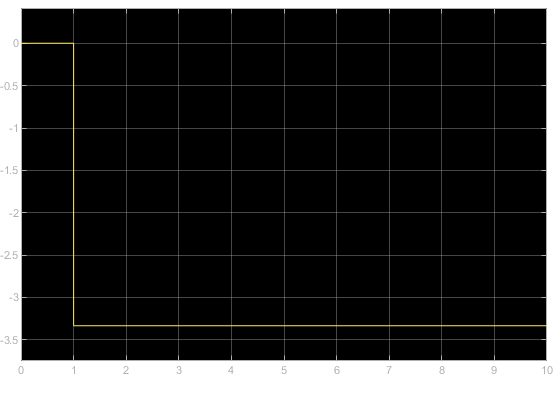
스텝 입력 후 샤프트는 약 3.3의 일정한 회전 속도에 도달합니다. 출력 속도는 PS Step 블록의 입력값 10의 크기의 1/3입니다. 이 결과는 시스템에 질량이나 마찰이 없기 때문에 시작 시 토크가 필요하지 않다는 점을 상기하십시오. 출력 샤프트 회전 방향을 입력 샤프트와 반대 방향으로 설정할 경우 포트 F는 포트 B와 반대 방향으로 회전한다는 점에 유의하십시오.
완성된 모델을 열려면 다음을 입력하십시오.
openExample('sdl/SimpleRotationalMechanicalSystemExample')참고 항목
How Simscape Models Represent Physical Systems | 모델을 위한 모델 구성 파라미터 설정하기 | Configure Model Layout | Simple Gear