radarmetricplot
Plot radar performance metric against target range
Syntax
Description
radarmetricplot(___,
specifies additional Name,Value)Name,Value arguments.
Example: 'MaxRangeRequirement',125e3,'MetricName','Available SNR'
specifies the maximum range requirement to be 125000 m, and the metric name to be
'Available SNR'
h = radarmetricplot(___)
Examples
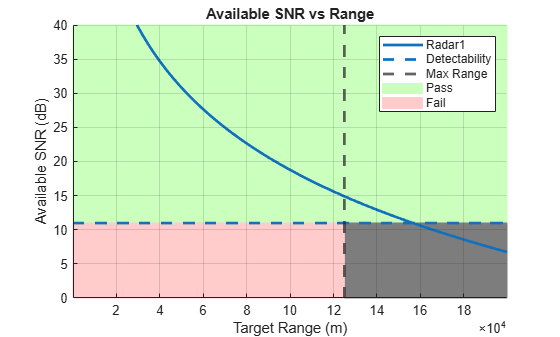
For a radar system, plot the available SNR and the detectability factor against the target range. Mark the required maximum range. Use the stoplight chart to assess the detection performance of the system at different ranges.
Scenario Parameters
Define the scenario parameters.
lambda = freq2wavelen(3e9); % Wavelength (m) Pt = 5e3; % Peak power (W) tau = 1.2e-5; % Pulse width (s) N = 24; % Number of received pulses SwerlingCase = 'Swerling1'; % Swerling case G = 40; % Antenna gain (dB) Pfa = 1e-6; % Pfa
Requirements
Specify the probability of detection to be 0.9 and the maximum range to be 125000 m.
Pd = 0.9; % Required Pd MaxRangeRq = 125e3; % Maximum range requirement (m)
Specify the range points to evaluate the radar equation.
R = (1:1e2:200e3).';
Compute Performance Metric and Requirement
Compute the available SNR and the detectability factor.
Compute the available SNR from the radar equation using the radareqsnr function.
SNRav = radareqsnr(lambda,R,Pt,tau,'Gain',G); Compute the detectability factor using the detectability function.
DxObj = detectability(Pd,Pfa,N,SwerlingCase)
DxObj = 10.9850
Plot Performance Metric and Requirement
Plot the available SNR in dB and the detectability factor against the target range using the radarmetricplot function. In order to plot, specify the 'MaxRangeRequirement' to be 125000 m. Set 'ShowStoplight' to true to show a stoplight chart that color codes the area of the plot according to the specified requirements.
radarmetricplot(R,SNRav,DxObj,'MaxRangeRequirement',MaxRangeRq, ... 'MetricName','Available SNR','MetricUnit','dB',... 'RequirementName','Detectability','ShowStoplight',true) ylim([0 40])
Input Arguments
Name-Value Arguments
Output Arguments
More About
References
[1] Charles S. Wasson. System engineering analysis, design, and development: Concepts, principles, and practices. John Wiley & Sons, 2015.
Extended Capabilities
Version History
Introduced in R2021a