interp1
구문
설명
예제
샘플 점 x와 대응하는 샘플 값 v를 정의합니다.
x = [1 2 5 6]; eul = [-185:45:-50; -20*ones(1,4); zeros(1,4)]'; v = quaternion(eul,"eulerd","ZYX","frame");
x의 범위에 쿼리 점을 정의합니다.
xq = [1.5 3 4 5.4];
쿼리 점에서 보간합니다.
vq = interp1(x,v,xq);
결과를 시각화하기 위해 샘플 쿼터니언과 보간된 쿼터니언을 사용하여 동일한 점을 회전시킵니다.
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
단위구를 플로팅한 다음, 샘플 쿼터니언과 보간된 쿼터니언을 구에 플로팅합니다.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,x,xq,10,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")

함수 값 세트를 정의합니다.
eul = [-170:20:-70; -20*sind(0:72:360)-25; zeros(1,6)]'; v = quaternion(eul,"eulerd","ZYX","frame");
디폴트 점 1:6 사이에 쿼리 점 세트를 정의합니다. 이 경우, v가 요소를 6개 가진 쿼터니언 배열이므로 디폴트 점은 1:6입니다.
xq = [1.5 2.6 3.5 4.5 5.5];
SQUAD 자연 보간 방법을 사용하여 xq에서 v를 평가합니다. 여기서 디폴트 "slerp-short" 보간 방법을 사용할 수 있지만, 이 쿼터니언 함수에서 설명하는 사인파 회전의 경우 SQUAD가 더 매끄러운 보간 경로를 생성합니다.
vq = interp1(v,xq,"squad-natural");결과를 시각화하기 위해 샘플 쿼터니언과 보간된 쿼터니언을 사용하여 x축의 점을 회전시킵니다.
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
단위구를 플로팅한 다음, 샘플 쿼터니언과 보간된 쿼터니언을 구에 플로팅합니다.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,1:6,xq,9,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")

서로 다른 방향을 나타내는 세 개의 쿼터니언을 정의합니다.
q0 = quaternion([0 0 0],"euler","ZYX","frame"); q1 = quaternion([pi/4 pi/6 pi/3],"euler","ZYX","frame"); q2 = quaternion([pi/2 pi/4 pi/2],"euler","ZYX","frame");
원래 키프레임에 대한 시간 벡터를 만듭니다.
x = [1 2 3];
보간에 대한 시간 벡터를 만듭니다.
T = linspace(0,3,300);
"slerp-natural" 방법과 "squad-natural" 방법으로 interp1을 사용하여 보간합니다.
quats_slerp = interp1(x,[q0 q1 q2],T,"slerp-natural")'; quats_squad = interp1(x,[q0 q1 q2],T,"squad-natural")';
두 보간 방법 모두에 대해 각속도를 계산합니다.
ang_vel_slerp = angvel(quats_slerp,T(2)-T(1),"frame"); ang_vel_squad = angvel(quats_squad,T(2)-T(1),"frame");
각속도를 플로팅합니다.
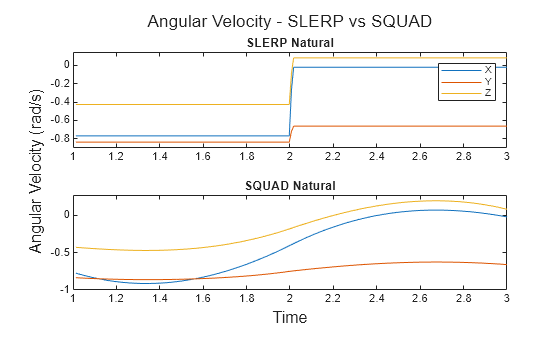
tl = tiledlayout(2,1);
title(tl,"Angular Velocity - SLERP vs SQUAD")SLERP 보간과 SQUAD 보간에 대한 각속도를 플로팅합니다. SQUAD 보간의 각속도가 SLERP를 사용한 보간보다 더 매끄럽습니다.
nexttile plot(T,ang_vel_slerp) ylim padded title("SLERP Natural") legend("X","Y","Z") nexttile plot(T,ang_vel_squad) ylim padded title("SQUAD Natural") xlabel(tl,"Time") ylabel(tl,"Angular Velocity (rad/s)")
샘플 점 x와 대응하는 샘플 값 v를 정의합니다.
x = [0 1 2]; eul = [0 30 60; 0 20 60; zeros(1,3)]'; v = quaternion(eul,"eulerd","ZYX","frame");
쿼리 점 xq가 x의 정의역을 벗어나도록 확장하여 지정합니다.
xq = [-0.5 0.5 1.5 2.5];
이제 "slerp-short" 보간 방법을 사용하여 xq에서 v를 평가하고, x의 정의역을 벗어난 값들에는 모든 부분이 0으로 설정된 쿼터니언을 할당합니다.
vq = interp1(x,v,xq,"slerp-short",ones("quaternion"))'
vq = 4×1 quaternion array
1 + 0i + 0j + 0k
0.98774 + 0.022751i - 0.084907j - 0.12903k
0.87097 + 0.151i - 0.30755j - 0.35217k
1 + 0i + 0j + 0k
입력 인수
출력 인수
알고리즘
참고 문헌
[1] Shoemake, Ken. "Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics 19, no. 3 (July 1985): 245–54. https://doi.org/10.1145/325165.325242.
[2] Dam, Erik B., Martin Koch, and Martin Lillholm. Quaternions, Interpolation and Animation. Technical Report DIKU-TR-98/5. Department of Computer Science, University of Copenhagen, July 17, 1998. https://web.mit.edu/2.998/www/QuaternionReport1.pdf.
확장 기능
버전 내역
R2025a에 개발됨