Backscatter Pedestrian
Backscatter signals from pedestrian
Libraries:
Radar Toolbox
Description
The Backscatter Pedestrian block models the monostatic reflection of non-polarized electromagnetic signals from a walking pedestrian. The pedestrian walking model coordinates the motion of 16 body segments to simulate natural motion. The model also simulates the radar reflectivity of each body segment. From this model, you can obtain the position and velocity of each segment and the total backscattered radiation as the body moves.
Ports
Input
Output
Parameters
More About
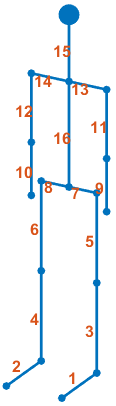
Body segment indices define which columns in the X, Ang, BPPOS, and BPVEL ports contain the data for a specific body segment. Body segment indices define which page in the Ax port contains the data for a specific body segments. For example, column 3 of X contains sample data for the left lower leg. Column 3 of Ang contains the arrival angle of the signal at the left lower leg.
| Body Segment | Index | |
|---|---|---|
| Left foot | 1 |
|
| Right foot | 2 | |
| Left lower leg | 3 | |
| Right lower leg | 4 | |
| Left upper leg | 5 | |
| Right upper leg | 6 | |
| Left hip | 7 | |
| Right hip | 8 | |
| Left lower arm | 9 | |
| Right lower arm | 10 | |
| Left upper arm | 11 | |
| Right upper arm | 12 | |
| Left shoulder | 13 | |
| Right shoulder | 14 | |
| Head | 15 | |
| Torso | 16 | |
Extended Capabilities
Version History
Introduced in R2021a