Plan Parallel Parking Path Using Multistage Nonlinear Model Predictive Control
This example shows how to plan a parallel parking path for an ego car in Simulink® using the Vehicle Path Planner System block. This block plans a vehicle path using multistage nonlinear model predictive control (MPC).
Parking Environment
In this example, the parking environment contains an ego vehicle and six static obstacles. The obstacles include four parked vehicles, the road curbside, and a yellow line on the road. The goal of the ego vehicle is to park at a target pose without colliding with any of the obstacles. The reference point for the ego vehicle pose is located at the center of rear axle.
The ego vehicle starts at an initial pose with the vector format [x-position, y-position, yaw angle].
egoInitialPose = [7,3.1,0];
To park the center of the ego vehicle at the target location (X = 0, Y = 0) use the following target pose, which specifies the location of the rear-axle reference point.
egoTargetPose = [-1.4,0,0];
Visualize the parking environment.
helperSLVisualizeParking(egoInitialPose,0);
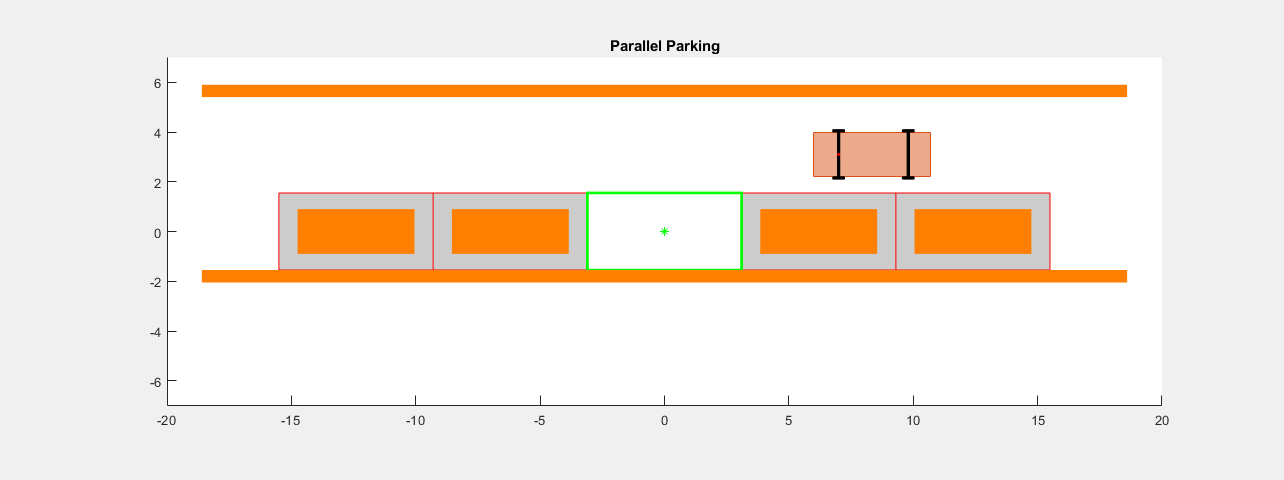
In the visualization, the four parked vehicles are the orange boxes in the middle. The bottom orange boundary is the road curbside and the top orange boundary is the yellow line on the road.
Configure Vehicle Path Planner System Block
Define the parameters of the ego vehicle. For this example, the ego vehicle parameters of the Vehicle Path Planner System block match the simulation parameters. If your simulation parameters differ from the default values, then update the block parameters accordingly.
vdims = vehicleDimensions; egoWheelbase = vdims.Wheelbase; distToCenter = 0.5*egoWheelbase;
Define the parameters of the six obstacles. Each row of obsMat contains five elements: position (x,y), heading angle, length, and width.
% Number of obstacles numObs = 6; % Each row represents an obstacle with five elements: [position (x,y), heading angle, length, and width] obsMat = [-12.4,0,0,4.7,1.8;... -6.2,0,0,4.7,1.8;... 6.2,0,0,4.7,1.8;... 12.4,0,0,4.7,1.8;... 0,-1.8,0,37.2,0.5;... 0,5.65,0,37.2,0.5];
Define the sample time and prediction horizon for the MPC controller.
Ts = 1; p = 10;
The velocity of the ego vehicle is constrained to the range [-2.5,2.5] m/s and the steering angle of the ego vehicle is constrained to the range [-30,30] degrees.
v_range = [-2.5,2.5]; steer_range = [-pi/6,pi/6];
To avoid collisions with obstacles, the minimum distance to all obstacles must be greater than a safe distance. Define this distance in meters.
d_safe = 0.2;
The Vehicle Path Planner System block can generate a reference path from the start pose of the ego car to a target pose.
Run Vehicle Path Planner in Simulink Model
Open the Simulink model.
mdl = 'pathPlanningVPP';
open_system(mdl)
Run the Simulink model and obtain the planned path.
out = sim(mdl); path = out.simout;
Run the animation to visualize results.
% animate timeLength = size(path,1); for ct = 1:timeLength helperSLVisualizeParking(path(ct,:), 0); pause(0.1); end

The animation shows that the ego vehicle path successfully parks at the target pose without any obstacle collisions.
Conclusion
This example shows how to parallel park an ego car by generating a path using the Vehicle Path Planner System block. The planner generated a collision-free path to the target parking spot.
% Enable message display mpcverbosity('on'); % Close Simulink model bdclose(mdl) % Close animation plots f = findobj('Name','Automated Parallel Parking'); close(f)