자율주행 응용 사례
자율주행 응용 분야에서 모델 예측 제어(MPC)를 사용하면 승객의 편안함과 안전을 유지하면서 차량의 반응 속도를 향상시킬 수 있습니다. MPC에는 차량의 가까운 미래 동작을 예측하고 최적화 중에 제약 조건을 명시적으로 처리하는 등 자율주행에 유용한 몇 가지 기능이 포함되어 있습니다. 자세한 내용은 Automated Driving Using Model Predictive Control 항목을 참조하십시오.
블록
| Adaptive Cruise Control System | Simulate adaptive cruise control using model predictive controller |
| Lane Keeping Assist System | Simulate lane-keeping assistance using adaptive model predictive controller |
| Path Following Control System | Simulate path-following control using adaptive model predictive controller |
| Vehicle Path Planner System | Plan collision-free path from initial pose to target pose (R2022b 이후) |
도움말 항목
MPC 주행 기본 사항
- Automated Driving Using Model Predictive Control
You can design and simulate automated driving systems using MPC controllers.
적응형 크루즈 컨트롤
- 모델 예측 제어를 사용한 적응형 크루즈 컨트롤 시스템
에고 차량의 종방향 가속도를 조정하여 설정 속도를 추종하고 선행 차량과의 안전 거리를 유지하는 MPC 제어기를 설계합니다. - Adaptive Cruise Control with Sensor Fusion (Automated Driving Toolbox)
Implement an automotive adaptive cruise controller using sensor fusion.
차선 유지 보조
- Lane Keeping Assist System Using Model Predictive Control
Design an MPC controller that keeps an ego vehicle traveling along the center of a straight or curved road by adjusting the front steering angle. - Lane Keeping Assist with Lane Detection (Automated Driving Toolbox)
Simulate and generate code for an automotive lane keeping assist controller.
차선 추종
- Lane Following Using Nonlinear Model Predictive Control
Design a lane-following controller using nonlinear MPC with road curvature previewing. - Lane Following Control with Sensor Fusion and Lane Detection (Automated Driving Toolbox)
Simulate and generate code for an automotive lane-following controller. - Highway Lane Following (Automated Driving Toolbox)
Simulate a lane-following controller and monocular camera-based perception algorithm in the Unreal Engine® simulation environment.
차선 변경
- Lane Change Assist Using Nonlinear Model Predictive Control
Design a lane-change controller using nonlinear MPC. - Highway Lane Change Planner and Controller (Automated Driving Toolbox)
Design and test the planner and controller components of a lane change maneuver system designed for highway driving.
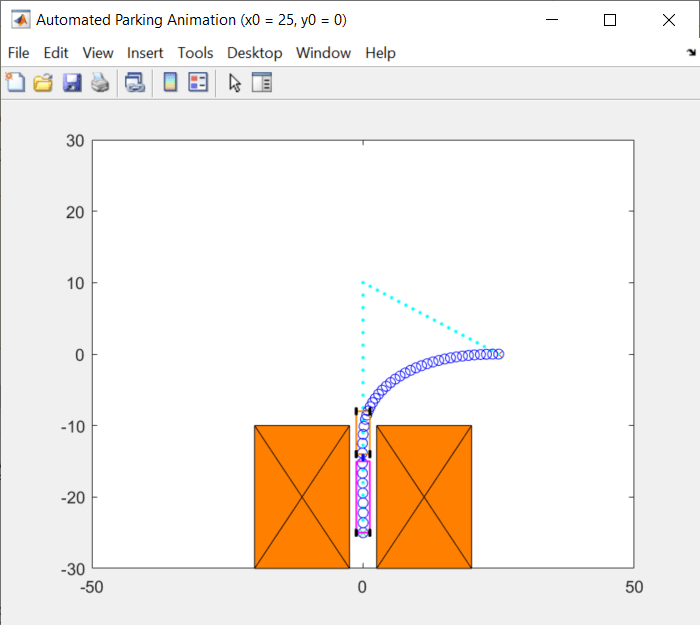
주차
- Plan Parallel Parking Path Using Multistage Nonlinear Model Predictive Control
You can plan a parking path for a vehicle using the Vehicle Path Planner System block. - Parking Valet Using Multistage Nonlinear Model Predictive Control
Design controller for parking garage valet using nonlinear model predictive control. - Parallel Parking Using Nonlinear Model Predictive Control
Design a parallel parking controller using nonlinear model predictive control. - Parallel Parking Using RRT Planner and MPC Tracking Controller
Automatically parallel park a vehicle by generating a path using the RRT star planner and tracking the trajectory using nonlinear model predictive control.
관련 정보
- 응용 분야 (Automated Driving Toolbox)
추천 예제

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink®, with RoadRunner Scenario.

Obstacle Avoidance Using Adaptive Model Predictive Control
Use adaptive MPC to make a vehicle follow a reference velocity and avoid obstacles by updating the plant model and linear mixed input/output constraints at run time.

Traffic Light Negotiation
Design and test decision logic for negotiating a traffic light at an intersection.
Truck and Trailer Automatic Parking Using Multistage Nonlinear MPC
Use multistage nonlinear MPC to park a truck and trailer system in presence of static obstacles.

Parallel Parking of Truck-Trailer Using Multistage Nonlinear MPC
Parallel park a truck-trailer system using multistage nonlinear MPC controllers for path planning and trajectory tracking.