rotate
지정된 원점과 방향을 기준으로 객체 회전
설명
예제
peaks 함수의 곡면 플롯을 만들고 surface 객체를 반환합니다.
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10])
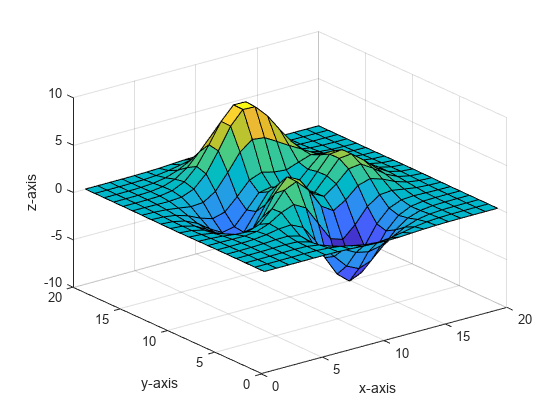
x축을 기준으로 곡면 플롯을 시계 방향으로 25도 회전합니다.
direction = [1 0 0]; rotate(s,direction,25)
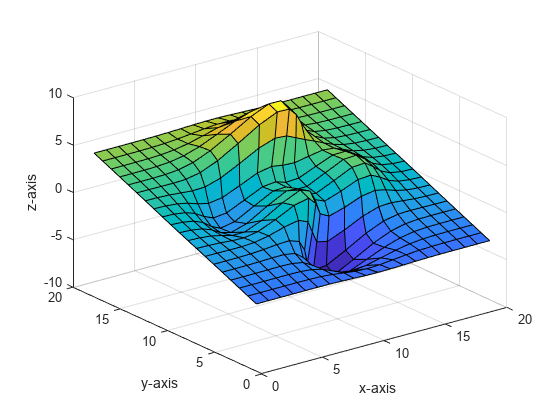
peaks 함수의 곡면 플롯을 만들고 surface 객체를 반환합니다.
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10])
x축과 y축을 기준으로 곡면 플롯을 시계 방향으로 25도 회전합니다.
direction = [1 1 0]; rotate(s,direction,25)

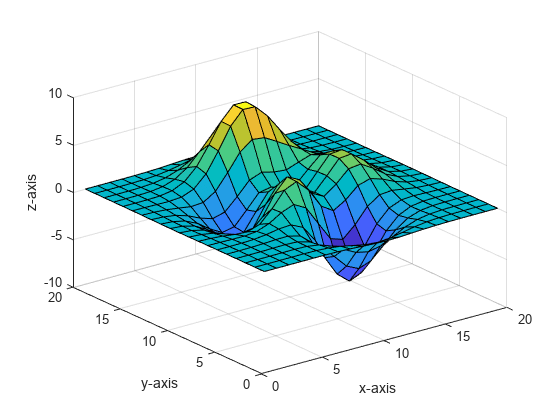
peaks 함수의 곡면 플롯을 만들고 surface 객체를 반환합니다.
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10])

y축을 기준으로 곡면 플롯을 시계 반대 방향으로 30도 회전하고 회전 원점을 (20, 10, 0)으로 설정합니다.
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10]) direction = [0 -1 0]; origin = [20 10 0]; rotate(s,direction,30,origin)

입력 인수
세부 정보
회전 축은 회전 원점과 방향 벡터 또는 점 P로 정의됩니다. rotate 함수의 경우, direction 입력 인수를 사용하여 P를 구면 좌표 [theta phi] 또는 카테시안 좌표 [x y z]로 지정합니다.
direction이 요소를 2개 가진 형식인 경우, theta는 xy 평면에서 양의 x축을 기준으로 시계 반대 방향으로 측정한 각도입니다. phi는 xy 평면에서 방향 벡터의 고도입니다.
3-요소 형식의 direction은 점 P의 카테시안 좌표를 지정합니다. 회전 축은 회전 원점에서 P까지의 방향 벡터를 따릅니다.
버전 내역
R2006a 이전에 개발됨
참고 항목
hgtransform | view | rotate3d | sph2cart