intersect
Intersection of polyshape objects or intersection of line
segment with polyshape
Syntax
Description
[
also returns vertex mapping information from the vertices in
polyout,shapeID,vertexID] = intersect(poly1,poly2)polyout to the vertices in poly1 and
poly2. The intersect function only
supports this syntax when poly1 and poly2 are
scalar polyshape objects.
The shapeID elements identify whether the corresponding vertex
in polyout originated in poly1,
poly2, or was created from the intersection.
vertexID maps the vertices of polyout to
the vertices of poly1, poly2, or the
intersection.
[
returns the line segments of in,out] = intersect(poly1,lineseg)lineseg that are inside and outside
of poly1. The matrix lineseg has two columns.
The first column defines the x-coordinates of the line segments
and the second column defines the corresponding
y-coordinates.
intersect supports this syntax only when
poly1 is a scalar polyshape and
lineseg contains no self-intersections.
___ = intersect(___,
specifies options using one or more name-value arguments in addition to any of the
input argument combinations in previous syntaxes. You can use any of the output
argument combinations in previous syntaxes. For example, Name=Value)polyout =
intersect(poly1,poly2,Simplify=false) returns a
polyshape object whose vertices have not been modified
regardless of intersections or improper nesting.
Examples
Create and plot two polygons.
poly1 = polyshape([0 0 1 1],[1 0 0 1]);
poly2 = polyshape([0.75 1.25 1.25 0.75],[0.25 0.25 0.75 0.75]);
plot(poly1)
hold on
plot(poly2)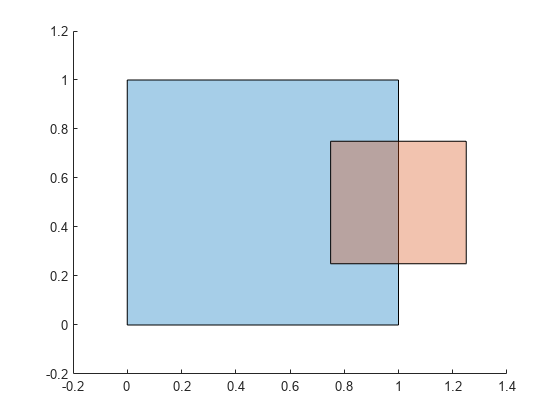
figure
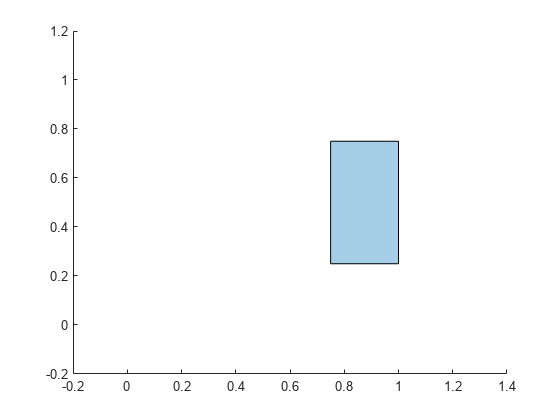
Compute and plot the intersection of poly1 and poly2.
polyout = intersect(poly1,poly2)
polyout =
polyshape with properties:
Vertices: [4×2 double]
NumRegions: 1
NumHoles: 0
plot(polyout) xlim([-0.2 1.4]); ylim([-0.2 1.2]);
Create a vector containing two polygons.
polyarray1 = polyshape([0 0 1 1],[1 0 0 1]); polyarray2 = polyshape([0.75 1.25 1.25 0.75],[0.25 0.25 0.75 0.75]); polyvec = [polyarray1 polyarray2]
polyvec =
1×2 polyshape array with properties:
Vertices
NumRegions
NumHoles
plot(polyvec(1))
hold on
plot(polyvec(2))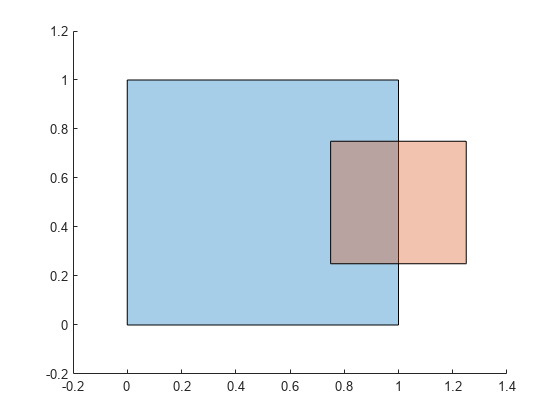
figure
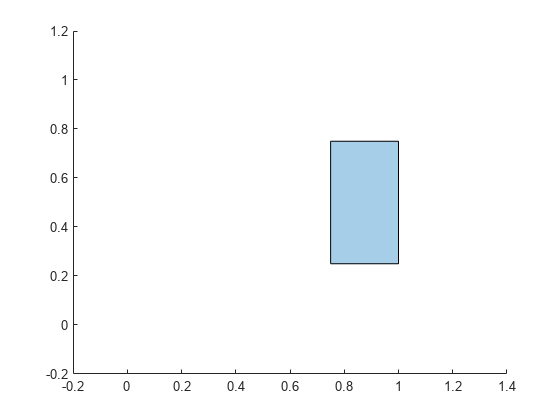
Compute the intersection of the elements of poly1.
polyout = intersect(polyvec)
polyout =
polyshape with properties:
Vertices: [4×2 double]
NumRegions: 1
NumHoles: 0
plot(polyout) xlim([-0.2 1.4]); ylim([-0.2 1.2]);
Create two polygons and compute their intersection. When calling the intersect function, specify three output arguments to return the vertex mapping information.
poly1 = polyshape([0 0 1 1],[1 0 0 1]); poly2 = polyshape([0.75 1.25 1.25 0.75],[0.25 0.25 0.75 0.75]); [polyout,shapeID,vertexID] = intersect(poly1,poly2);
Display the vertex coordinates of the intersection and the corresponding vertex mapping information.
Vertices = polyout.Vertices; table(Vertices,shapeID,vertexID)
ans=4×3 table
Vertices shapeID vertexID
____________ _______ ________
0.75 0.25 2 1
0.75 0.75 2 2
1 0.75 0 0
1 0.25 0 0
The first two values in shapeID are 2, indicating that the corresponding vertices of the intersection originated in poly2. The corresponding values in vertexID are 1 and 2, indicating that the vertices are the first and second vertices in the property poly2.Vertices. The last two vertices of polyout were created from the intersection because the corresponding values in shapeID and vertexID are 0.
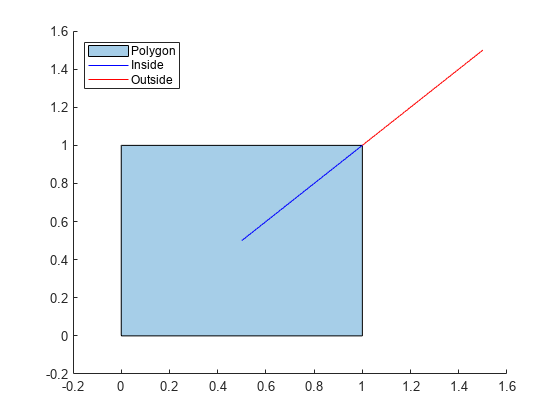
Create a rectangular polygon and a line segment.
poly1 = polyshape([0 0 1 1],[1 0 0 1]); lineseg = [0.5 0.5; 1.5 1.5];
Compute the intersection of the polygon with the line segment. Plot the sections of the line segment that are inside and outside the polygon.
[in,out] = intersect(poly1,lineseg); plot(poly1) hold on plot(in(:,1),in(:,2),"b",out(:,1),out(:,2),"r") legend("Polygon","Inside","Outside",Location="northwest")
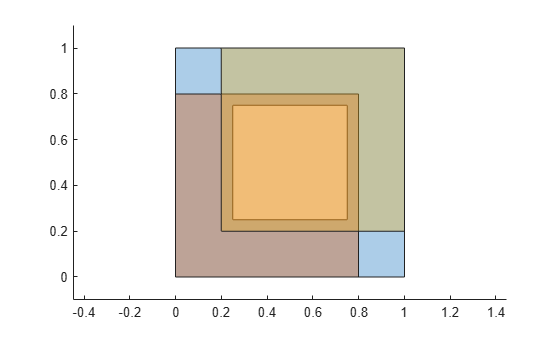
Create and plot three polygons. The first polygon represents a square with a hole at its center, and the other two polygons are squares without holes.
poly1 = polyshape([0.25 0.25 0.75 0.75], ... [0.75 0.25 0.25 0.75]); poly2 = polyshape([0 0 1 1],[1 0 0 1]); poly1 = subtract(poly2,poly1); poly2 = scale(poly2,0.8); poly3 = translate(poly2,[0.2 0.2]); plot([poly1 poly2 poly3]) axis equal
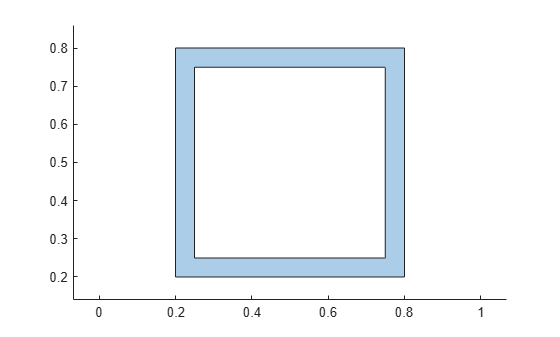
Compute and plot their intersection.
[polyout,shapeID,vertexID] = ... intersect([poly1 poly2 poly3]); plot(polyout) axis equal
Display the vertex coordinates of the resulting polyshape object and the corresponding vertex mapping information.
Vertices = polyout.Vertices; table(Vertices,shapeID,vertexID)
ans=9×3 table
Vertices shapeID vertexID
____________ _______ ________
0.25 0.75 1 6
0.25 0.25 1 7
0.75 0.25 1 8
0.75 0.75 1 9
NaN NaN NaN NaN
0.8 0.8 2 2
0.8 0.2 0 0
0.2 0.2 3 4
0.2 0.8 0 0
The resulting intersection has two boundaries. In the Vertices property of the output polyshape object, the two sets of boundary coordinates are separated by a row of NaN values. The corresponding values in shapeID and vertexID are also NaN.