linkprop
그래픽스 객체(Graphics Object)의 대응하는 속성에 대해 동일한 값 유지
구문
hlink = linkprop(obj_handles,'PropertyName')
hlink = linkprop(obj_handles,{'PropertyName1','PropertyName2',...})
설명
linkprop를 사용하면 각기 다른 그래픽스 객체의 대응하는 속성에 대해 동일한 값을 유지할 수 있습니다.
참고
linkprop는 그래픽스 객체에만 사용하십시오.
hlink = linkprop(obj_handles,'은 PropertyName') obj_handles에 핸들이 표시되는 모든 객체의 속성 PropertyName에 대해 동일한 값을 유지합니다. linkprop는 링크 객체를 hlink로 반환합니다. 자세한 내용은 연결 객체 정보 항목을 참조하십시오.
hlink = linkprop(obj_handles,{'는 PropertyName1','PropertyName2',...})obj_handles에 핸들이 표시되는 모든 객체에서 셀형 배열로 전달된 모든 속성에 대해 각각 동일한 값을 유지합니다.
MATLAB®은 linkprop가 호출될 때 모든 연결된 객체의 연결된 속성을 즉시 업데이트합니다. obj_handles 목록의 첫 번째 객체에 따라 다른 객체의 속성값이 결정됩니다.
일련의 그래픽스 객체에는 주어진 시간에 해당 속성을 연결하는 링크 객체가 하나만 포함될 수 있습니다. linkprop를 호출하면 새 링크 객체가 생성됩니다. 이렇게 생성된 새 링크 객체는 obj_handles에 지정된 객체와 연결된 기존의 링크 객체를 대체합니다. 그러나 해당 객체에 대해 메서드를 호출하여 연결되는 속성과 객체를 관리할 수 있습니다.
연결된 객체 목록에 객체를 추가하려면
addtarget메서드를 사용하십시오.현재 연결된 객체의 새 속성을 연결하려면
addprop메서드를 사용하십시오.객체 연결을 중지하려면
removetarget메서드를 사용하십시오.속성의 연결을 중지하려면
removeprop메서드를 사용하십시오.
연결 객체 정보
linkprop에서 반환하는 연결(Link) 객체에는 각기 다른 그래픽스 객체의 속성을 연결하는 메커니즘이 저장되어 있습니다. 따라서 링크 객체는 속성이 연결되기를 원하는 컨텍스트 내에 있어야 합니다. 예를 들어, 사용자가 명령줄이나 Figure 툴에서 객체와 상호 작용하려는 경우 연결 객체는 기본 작업 공간에 있어야 합니다.
다음 목록에서는 링크 객체에 대한 참조를 유지하는 방법을 설명합니다.
연결 객체를 함수의 출력 인수로 반환하고, 연결된 객체와 상호 작용하는 동안 기본 작업 공간에 유지합니다.
hlink변수를 전역(Global)으로 설정합니다.hlink변수를 객체의UserData속성이나 애플리케이션 데이터에 저장합니다.
연결 객체 업데이트
그래픽스 객체나 연결된 속성을 변경하려면 해당 용도에 맞게 설계된 연결 객체 메서드를 사용해야 합니다. 이러한 메서드는 연결 객체에서만 동작하는 함수입니다. 이러한 메서드를 사용하려면 먼저 linkprop를 사용하여 연결 객체를 만들어야 합니다.
메서드 | 용도 |
|---|---|
addtarget | 지정된 그래픽스 객체를 연결 객체의 대상에 추가합니다. |
removetarget | 연결 객체의 대상에서 지정된 그래픽스 객체를 제거합니다. |
addprop | 지정된 속성을 연결된 속성에 추가합니다. |
removeprop | 연결된 속성에서 지정된 속성을 제거합니다. |
메서드 구문
addtarget(hlink,obj_handles) removetarget(hlink,obj_handles) addprop(hlink,'PropertyName') removeprop(hlink,'PropertyName')
메서드 인수
hlink— 다음에서 반환된 링크 객체:linkpropobj_handles— 하나 이상의 그래픽스 객체 핸들PropertyName— 모든 대상 객체에 공통된 속성의 이름
예제
하나의 좌표축을 회전시키면 다른 좌표축이 자동으로 회전되도록 두 좌표축의 속성을 연결합니다.
두 개의 좌표축이 있는 Figure를 만들고 axes 핸들을 저장합니다. 두 좌표축에 모두 플롯을 추가합니다.
figure ax1 = subplot(2,1,1); [X1,Y1,Z1] = peaks; surf(X1,Y1,Z1) ax2 = subplot(2,1,2); [X2,Y2,Z2] = peaks(10); surf(X2,Y2,Z2)
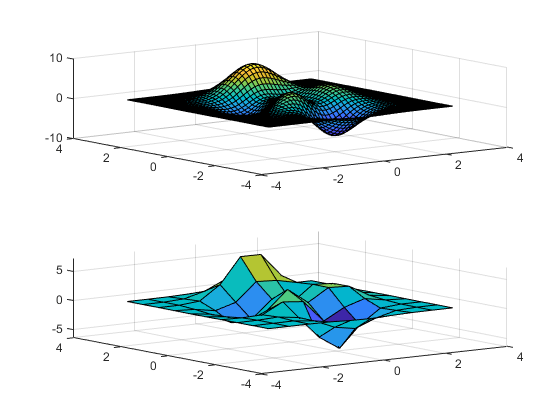
좌표축의 CameraPosition 속성과 CameraUpVector 속성을 연결하고 link 객체 핸들을 반환합니다. 그런 다음, 대화형 방식 회전을 활성화하고 마우스를 사용하여 둘 중 하나의 좌표축을 회전시킵니다. 하나의 좌표축을 회전시키면 다른 좌표축이 자동으로 동일한 방식으로 회전됩니다.
hlink = linkprop([ax1,ax2],{"CameraPosition","CameraUpVector"});
rotate3d on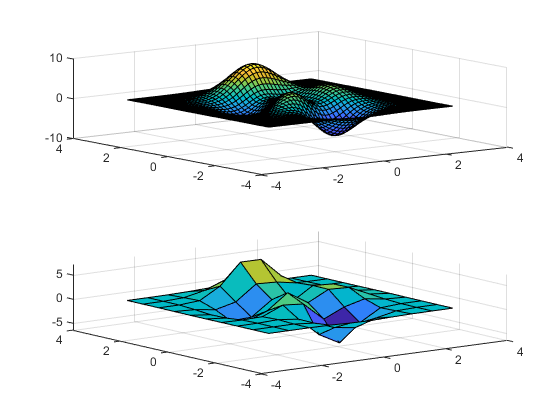
대화형 방식 회전을 비활성화하려면 rotate3d off를 사용하십시오.
link 객체 핸들과 속성 이름을 addprop 함수에 전달하여 추가 속성을 연결합니다.
addprop(hlink,'PlotBoxAspectRatio')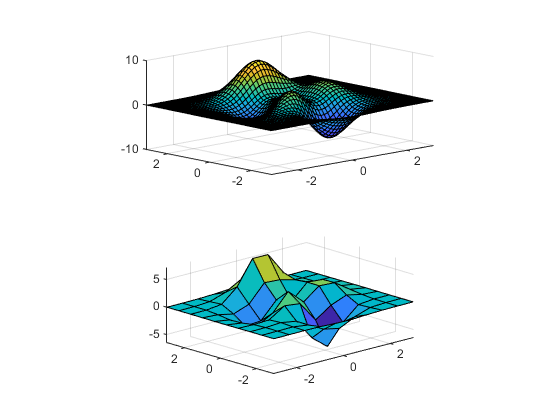
버전 내역
R2006a 이전에 개발됨
참고 항목
getappdata | ishghandle | linkaxes | linkdata | setappdata