MapCellsReference
Reference raster cells to map coordinates
Description
For a 2-D raster of cells, a MapCellsReference object
describes the relationship between the intrinsic coordinate system for the raster
and a planar coordinate system. The object associates each element of the raster with a
location in planar coordinates.
A MapCellsReference object assumes that the raster is sampled
regularly in the world xy-coordinates of the map system. The sample
spacing from row to row does not need to equal the sample spacing from column to
column.
The intrinsic and world coordinate systems have a rectilinear relationship when the axes of the intrinsic and world coordinate systems align. The coordinate systems have a affine relationship when the intrinsic axes are rotated with respect to the world axes. An affine relationship allows for rotation and skew.
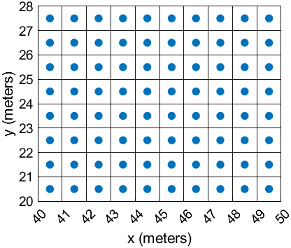
This image illustrates a 8-by-10 raster of cells in planar coordinates. The raster cells have an extent of 1 meter in x and y, cover x values in the range [40,50] in meters, and cover y values in the range [20,28] in meters. The boundary of the raster of cells is made up of the outermost boundaries of the outermost cells.
To reference a raster of postings to planar map coordinates, use a MapPostingsReference object instead.
Creation
You can use these functions to create MapCellsReference
objects:
readgeoraster— Import a raster data file as an array and a reference object.maprefcells— Create a map raster reference object by specifying the x and y world limits of the raster and either the size of the raster or the extent of the cells.maprasterref— Convert a world file to a map raster reference object.refmatToMapRasterReference— Convert a referencing matrix to a map raster reference object.
Properties
Object Functions
contains | Determine if geographic or map raster contains points |
cropToBlock | Crop raster reference object to row and column limits of raster |
firstCornerX | Return world x-coordinate of map raster index (1,1) |
firstCornerY | Return world y-coordinate of map raster index (1,1) |
intrinsicToWorld | Transform intrinsic to planar world coordinates |
sizesMatch | Determine if geographic or map raster object and image or raster are size-compatible |
worldFileMatrix | Return world file parameters for transformation |
worldGrid | World coordinates of raster elements |
worldToDiscrete | Convert planar world coordinates to discrete subscripts |
worldToIntrinsic | Transform planar world to intrinsic coordinates |
Examples
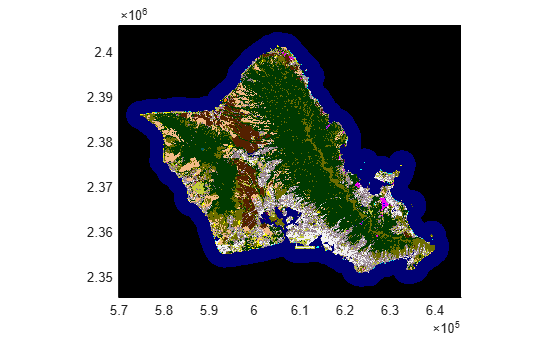
Import a land cover classification of Oahu, Hawaii as an array, a MapCellsReference object, and a colormap by using the readgeoraster function.
[Z,R,cmap] = readgeoraster('oahu_landcover.img');View the properties of the MapCellsReference object.
R
R =
MapCellsReference with properties:
XWorldLimits: [569857 645907]
YWorldLimits: [2345284 2405884]
RasterSize: [2020 2535]
RasterInterpretation: 'cells'
ColumnsStartFrom: 'north'
RowsStartFrom: 'west'
CellExtentInWorldX: 30
CellExtentInWorldY: 30
RasterExtentInWorldX: 76050
RasterExtentInWorldY: 60600
XIntrinsicLimits: [0.5 2535.5]
YIntrinsicLimits: [0.5 2020.5]
TransformationType: 'rectilinear'
CoordinateSystemType: 'planar'
ProjectedCRS: [1×1 projcrs]
Display the land cover classification on a map.
mapshow(Z,cmap,R)
More About
Version History
Introduced in R2013b