라이다 포인트 클라우드 데이터 읽기, 처리하기, 쓰기
이 예제에서는 포인트 클라우드를 작업 공간으로 읽어오고 원하는 일련의 점들을 선택한 다음 선택한 점들을 포인트 클라우드 파일 형식에 쓰는 방법을 보여줍니다.
1단계: 포인트 클라우드 읽기 및 표시하기
lasFileReader 함수를 사용하여 .las 파일의 데이터를 작업 공간으로 읽어옵니다. 출력 lasFileReader 객체에 저장된 속성을 표시합니다.
fileName = fullfile(toolboxdir("lidar"),"lidardata","las","aerialLidarData.laz"); lasReader = lasFileReader(fileName)
lasReader =
lasFileReader with properties:
Count: 1018047
XLimits: [4.2975e+05 4.3015e+05]
YLimits: [3.6798e+06 3.6801e+06]
ZLimits: [72.7900 125.8200]
Attributes: ["Classification" "LaserReturn" "NumReturns" "ScanDirectionFlag" "EdgeOfFlightLineFlag" "ScanAngle" "UserData" "PointSourceID" "GPSTimeStamp"]
ClassificationInfo: "To get the value, enter lasReader.ClassificationInfo at the Command Window. Learn more"
LaserReturnInfo: [4×2 table]
VariableLengthRecords: [3×3 table]
Show all properties
.las 파일에서 포인트 클라우드를 읽어옵니다.
ptCloud = readPointCloud(lasReader);
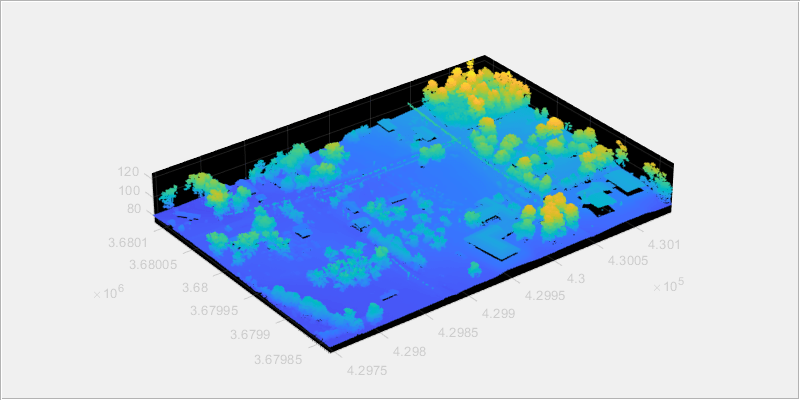
포인트 클라우드를 표시합니다.
fig = figure(Position=[0 0 800 400]); hPanel = uipanel(fig); hPlot = axes(hPanel); pcshow(ptCloud.Location,Parent=hPlot)
2단계: 원하는 일련의 점들을 선택하기
객체 클래스에 대한 분류 값과 ROI(관심 영역) 내 점들의 인덱스를 지정하여 입력 포인트 클라우드에서 원하는 일련의 점들을 선택할 수 있습니다.
분류 값을 지정하여 점 선택하기
분류 값을 지정하여 점들을 선택하려면,
lasFileReader객체의ClassificationInfo속성을 사용하여 입력 포인트 클라우드에서 객체 클래스에 대한 정보를 읽어옵니다.
disp(lasReader.ClassificationInfo)
Classification Value Class Name Number of Points by Class
____________________ ___________________ _________________________
1 "Unclassified" 114842
2 "Ground" 646632
4 "Medium Vegetation" 210101
6 "Building" 45699
8 "Reserved(8)" 751
9 "Water" 22
readpointCloud함수를 사용하여 입력 포인트 클라우드에서 읽어올 객체 클래스에 대한 분류 값을 지정합니다. 중간 정도의 초목 영역에 대응하는 점들을 읽어오려면Classification이름-값 인수에 대한 값을 4로 설정합니다.
ptCloudB = readPointCloud(lasReader,Classification=4);
포인트 클라우드를 표시합니다.
fig1 = figure(Position=[0 0 800 400]); hPanel1 = uipanel(fig1); hPlot1 = axes(hPanel1); pcshow(ptCloudB.Location,Parent=hPlot1)

인덱스를 지정하여 점 선택하기
입력 포인트 클라우드의 x, y, z 좌표의 범위 내에서 직육면체 ROI를 정의합니다.
roi = [lasReader.XLimits(1)+200, lasReader.XLimits(2), ...
lasReader.YLimits(1), lasReader.YLimits(2), lasReader.ZLimits(1), lasReader.ZLimits(2)];직육면체 ROI 범위 내에 있는 점들의 인덱스를 구합니다.
indices = findPointsInROI(ptCloudB,roi);
직육면체 ROI 범위 내에 있는 점들을 선택하고 point cloud 객체로 저장합니다.
ptCloudC = select(ptCloudB,indices);
포인트 클라우드를 표시합니다.
fig2 = figure(Position=[0 0 800 400]); hPanel2 = uipanel(fig2); hPlot2 = axes(hPanel2); pcshow(ptCloudC.Location,Parent=hPlot2)

3단계: 선택한 점들을 .las 파일 형식에 쓰기
.las 파일의 이름을 지정하고 lasFileWriter 객체를 만듭니다.
newfileName = "aerialvegetation.las";
lasWriter = lasFileWriter(newfileName);writePointCloud 함수를 사용하여, 선택한 점들을 .las 파일에 씁니다. 이 함수는 현재 작업 디렉터리에 새 파일을 만듭니다.
writePointCloud(lasWriter,ptCloudC);
4단계: 새로 쓴 파일의 속성 확인하기
newlasReader = lasFileReader(newfileName)
newlasReader =
lasFileReader with properties:
Count: 116598
XLimits: [4.2995e+05 4.3015e+05]
YLimits: [3.6798e+06 3.6801e+06]
ZLimits: [84.9500 123.1100]
Attributes: ["Classification" "LaserReturn" "NumReturns" "ScanDirectionFlag" "EdgeOfFlightLineFlag" "ScanAngle" "UserData" "PointSourceID" "GPSTimeStamp" "ScannerChannel"]
ClassificationInfo: "To get the value, enter newlasReader.ClassificationInfo at the Command Window. Learn more"
LaserReturnInfo: [1×2 table]
VariableLengthRecords: [1×3 table]
Show all properties
참고 항목
lasFileReader | pcshow | readPointCloud | findPointsInROI | pointCloud | select