영상 좌표계
여러 다른 영상 좌표계를 사용하여 영상 내 위치에 액세스할 수 있습니다. 영상은 배열로 저장되기 때문에 이산 픽셀 인덱스를 사용하여 위치를 지정할 수 있습니다. 연속 공간에서는 영상이 실제 장면을 나타내기 때문에 연속 공간 좌표를 사용하여 위치를 지정할 수도 있습니다.
픽셀 인덱스
MATLAB의 영상에서 설명하듯이, MATLAB®은 대부분의 영상을 배열로 저장합니다. 배열의 각 (행, 열) 인덱스는 표시된 영상의 각 픽셀에 대응됩니다.
픽셀 인덱스와 행렬의 처음 2개 차원의 첨자는 일대일로 대응합니다. MATLAB의 배열 인덱싱과 마찬가지로 픽셀 인덱스는 정수 값이며, 범위는 1부터 행의 길이 또는 열의 길이까지입니다. 인덱스는 위에서 아래로, 왼쪽에서 오른쪽으로 순서가 정해집니다.
예를 들어, 다섯 번째 행, 두 번째 열의 픽셀에 대한 데이터는 행렬 요소 (5, 2)에 저장됩니다. 일반적인 MATLAB 행렬 첨자를 사용하여 개별 픽셀의 값에 액세스할 수 있습니다. 예를 들어, 다음 MATLAB 코드는
I(2,15)
단일채널 영상 I의 행 2, 열 15에 있는 픽셀의 값을 반환합니다. 마찬가지로 다음 MATLAB 코드는
RGB(2,15,:)
다중채널 영상 RGB의 행 2, 열 15에 있는 픽셀의 색 값을 반환합니다.
공간 좌표
공간 좌표계에서 영상 내의 위치는 연속 평면 위의 위치에 해당합니다. 위치는 (픽셀 인덱싱 시스템에서 사용하는 행과 열이 아니라) 카테시안 x, y 좌표를 사용하여 표현됩니다. 이 카테시안 좌표에서 (3.2, 5.3)과 같은 (x,y) 좌표는 유의미하며 좌표 (5, 3)과는 다릅니다.
Image Processing Toolbox™는 참조 프레임에 따라 다음 두 가지 유형의 공간 좌표계를 정의합니다. 내재적 좌표는 영상의 참조 프레임을 기준으로 위치를 지정합니다. 세계 좌표는 외부의 세계 관찰자를 기준으로 위치를 지정합니다.
내재적 좌표
툴박스는 기본적으로 내재적 좌표계를 사용하여 공간 영상 좌표를 정의합니다. 이 공간 좌표계는 영상의 픽셀 인덱스에 대응됩니다. 픽셀 중심점의 내재적 좌표 (x, y)는 해당 픽셀의 열, 행 인덱스와 동일합니다. 예를 들어, 행 5, 열 3에 있는 픽셀의 중심점은 공간 좌표가 x = 3.0, y = 5.0입니다. 하지만 내재적 좌표 (3.0, 5.0)은 픽셀 인덱스 (5, 3)과 순서가 반대입니다.
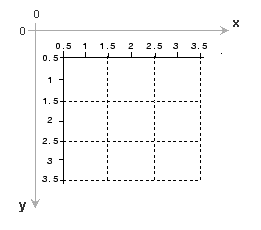
모든 픽셀의 중심은 내재적 좌표가 정수 값입니다. 왼쪽 위 픽셀의 중심은 내재적 좌표가 (1.0, 1.0)입니다. 오른쪽 아래 픽셀의 중심은 내재적 좌표가 (numCols, numRows)입니다. 여기서 numCols와 numRows는 각각 영상의 열 개수와 행 개수입니다. 일반적으로 (행, 열) 픽셀 인덱스가 (r, c)인 픽셀의 중심은 내재적 좌표계에서 공간 좌표가 x = c, y = r입니다.
내재적 좌표계에서 각 픽셀의 크기는 1 단위이므로 영상의 경계는 소수점 좌표를 갖습니다. 영상의 왼쪽 위 코너는 (0, 0)이 아니라 (0.5, 0.5)에 있습니다. 마찬가지로, 영상의 오른쪽 아래 코너는 (numCols + 0.5, numRows + 0.5)에 있습니다.
몇몇 함수는 픽셀 인덱스보다 공간 좌표를 주로 사용합니다. 하지만 디폴트 공간 좌표계(내재적 좌표)를 사용하는 한, 열(x)과 행(y)으로 그들의 위치를 지정할 수 있습니다.
3차원 영상의 경우 z축은 오른손 좌표계를 따라 페이지 안쪽으로 들어가는 방향을 가리킵니다. 복셀 중심점의 내재적 좌표 (x,y,z)는 해당 복셀의 열, 행 및 페이지(또는 평면) 인덱스와 동일합니다. 예를 들어, 행 5, 열 3, 페이지 2에 있는 복셀의 중심점은 공간 좌표가 x = 3.0, y = 5.0, z = 2.0입니다. 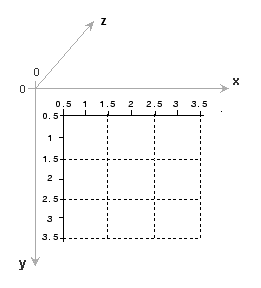 2차원 영상과 마찬가지로, 3차원 영상에서 모든 복셀의 중심은 내재적 좌표가 정수 값이고, 각 복셀의 크기는 1 단위입니다. 3차원을 초과하는 다차원 영상의 경우, 마찬가지로 z축 다음의 좌표축은 세 번째 차원 다음의 배열 인덱스에 대응됩니다.
2차원 영상과 마찬가지로, 3차원 영상에서 모든 복셀의 중심은 내재적 좌표가 정수 값이고, 각 복셀의 크기는 1 단위입니다. 3차원을 초과하는 다차원 영상의 경우, 마찬가지로 z축 다음의 좌표축은 세 번째 차원 다음의 배열 인덱스에 대응됩니다.
세계 좌표
세계 좌표계(디폴트가 아닌 공간 좌표계라고도 함)를 사용하면 내재적 좌표계의 여러 제약 조건이 완화됩니다. 세계 좌표계에서는 픽셀 또는 복셀이 임의의 길이, 너비 또는 깊이를 가질 수 있고 임의의 좌표에서 중앙에 위치할 수 있습니다.
다음과 같은 경우 2차원, 3차원 또는 다차원 영상에 세계 좌표계를 사용하는 것이 좋습니다.
영상에서 기하 변환(예: 평행 이동)을 수행하려 하며 새로운 위치와 원래 위치 간의 관계 정보를 유지하고 싶은 경우.
픽셀 또는 복셀이 등방성이 아닌 경우. 예를 들어, MRI(자기공명영상)에서 복셀의 x 및 y 방향의 샘플링 레이트가 z 방향의 샘플링 레이트보다 더 높을 때 그러한 데이터를 수집할 수 있습니다.
픽셀 또는 복셀의 범위가 어떻게 실세계의 위치에 맞춰지는지 알고 있는 경우. 예를 들어, 항공 사진에서는 각 픽셀이 지표면의 특정 5×5미터 패치에 대응될 수 있습니다.
축의 방향을 반전하고자 하는 경우. 이는 지리공간 데이터로 작업할 때 자주 사용되는 기법입니다.
세계 좌표계를 정의하는 방법에는 여러 가지가 있습니다. 공간 참조 객체를 사용하여 세계 좌표계를 정의할 수 있습니다. 이 객체는 세계 좌표계에서의 영상의 위치, 해상도, 범위는 물론 그 영상 범위가 내재적 좌표 및 세계 좌표와 어떻게 연결되는지 인코딩합니다. 공간 참조 객체의 각 차원에서 최대 좌표와 최소 좌표를 인코딩할 수도 있습니다. 자세한 내용은 Define World Coordinate System of Image 항목을 참조하십시오.