Use State-Space Estimation to Reduce Model Order
Reduce the order of a Simulink® model by linearizing the model and estimating a lower order model that retains model dynamics.
This example requires Simulink and the Simulink Control Design™ toolbox.
Consider the Simulink® model idF14Model. Linearizing this model gives a ninth-order model. However, the dynamics of the model can be captured, without compromising the fit quality too much, using a lower-order model.
Obtain the linearized model.
load_system('idF14Model') io = getlinio('idF14Model'); sys_lin = linearize('idF14Model',io);
sys_lin is a ninth-order state-space model with two outputs and one input.
Simulate the step response of the linearized model, and use the data to create an iddata object.
Ts = 0.0444; t = (0:Ts:4.44)'; y = step(sys_lin,t); data = iddata([zeros(20,2);y],[zeros(20,1); ones(101,1)],Ts);
data is an iddata object that encapsulates the step response of sys_lin.
Compare the data to the model linearization.
compare(data,sys_lin);
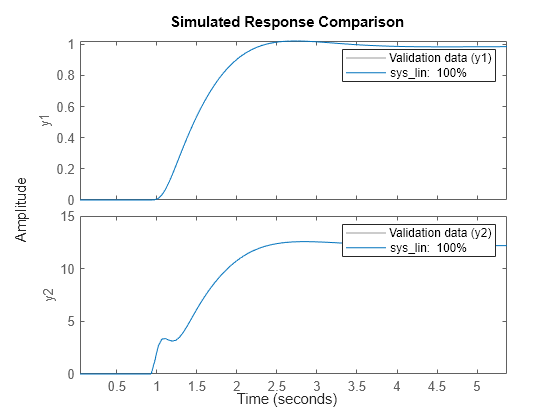
Because the data was obtained by simulating the linearized model, there is a complete match between the data and model linearization response.
Identify a state-space model with a reduced order that adequately fits the data.
Determine an optimal model order.
nx = 1:9; sys1 = ssest(data,nx,'DisturbanceModel','none');
A plot showing the Hankel singular values (SVD) for models of the orders specified by
nx appears.
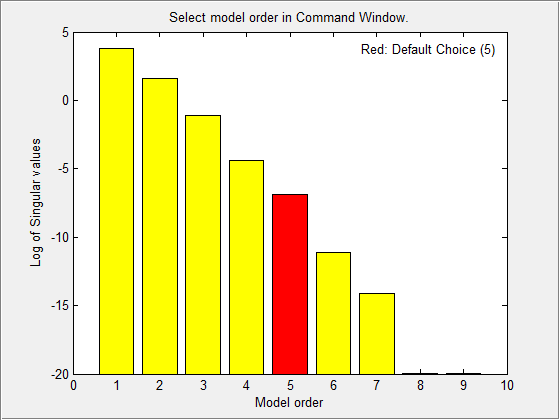
States with relatively small Hankel singular values can be safely discarded. The plot suggests using a fifth-order model.
At the MATLAB® command prompt, select the model order for the estimated state-space model. Specify
the model order as 5, or press Enter to use the default
order value.
Compare the data to the estimated model.
compare(data,sys1);
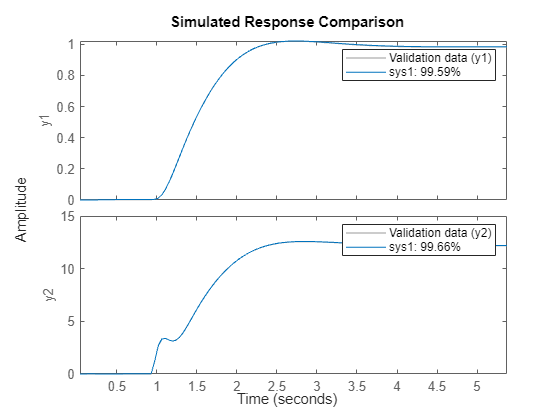
The plot displays the fit percentages for the two sys1 outputs. The four-state reduction in model order results in a relatively small reduction in fit percentage.
Examine the stopping condition for the search algorithm.
sys1.Report.Termination.WhyStop
ans = 'Maximum number of iterations reached.'
Create an estimation options set. Specify the 'lm' search method. Increase the maximum number of search iterations to 50 from the default maximum of 20.
opt = ssestOptions('SearchMethod','lm'); opt.SearchOptions.MaxIterations = 50; opt.Display = 'on';
Identify a state-space model using the estimation option set and sys1 as the estimation initialization model.
sys2 = ssest(data,sys1,opt);
Compare the response of the linearized and the estimated models.
compare(data,sys_lin,sys2);
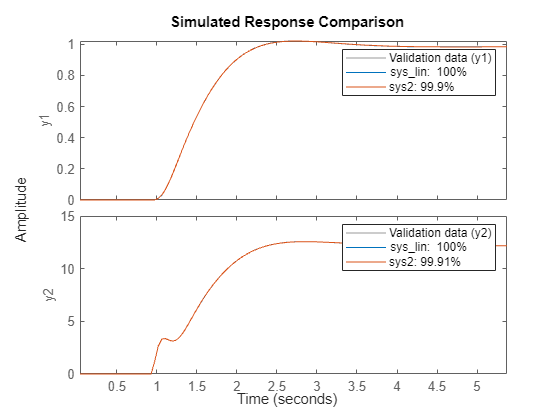
The updated option set results in better fit percentages for sys2.
See Also
linearize (Simulink Control Design) | getlinio (Simulink Control Design)