Type-2 Fuzzy Inference Systems
For any value in the universe of discourse, a traditional type-1 membership function has a single membership value. Therefore, while a type-1 membership function models the degree of membership in a given linguistic set, it does not model uncertainty in the degree of membership. To model such uncertainty, you can use interval type-2 membership functions. In such type-2 membership functions, the degree of membership can have a range of values.
For examples that use type-2 fuzzy inference systems, see Fuzzy PID Control with Type-2 FIS and Predict Chaotic Time Series Using Type-2 FIS.
Interval Type-2 Membership Functions
An interval type-2 membership function is defined by an upper and lower membership function. The upper membership function (UMF) is equivalent to a traditional type-1 membership function. The lower membership function (LMF) is less than or equal to the upper membership function for all possible input values. The region between the UMF and LMF is the footprint of uncertainty (FOU). The following diagram shows the UMF (red), the LMF (blue), and the FOU (shaded) for a type-2 triangular membership function.
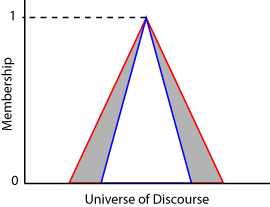
For each input value in the universe of discourse, the degree of membership is the range of values between the LMF and UMF values.
Type-2 Fuzzy Inference Systems
Using Fuzzy Logic Toolbox™ software, you can create both type-2 Mamdani and Sugeno fuzzy inference systems.
In type-2 Mamdani systems, both the input and output membership functions are type-2 fuzzy sets.
In type-2 Sugeno systems, only the input membership functions are type-2 fuzzy sets. The output membership functions are the same as for a type-1 Sugeno system — constant or a linear function of the input values.
To create type-2 Mamdani and Sugeno systems at the command line, use mamfistype2 and
sugfistype2 objects,
respectively. These objects have the same parameters as the type-1
mamfis and sugfis objects along with an
additional TypeReductionMethod parameter.
You can create a type-2 fuzzy inference system by converting an existing type-1 system,
such as one created using the genfis function. To do so, use the convertToType2
function.
Once you create a type-2 fuzzy inference system, you can:
Evaluate the fuzzy system using the
evalfisfunctionsSimulate the fuzzy system using the Fuzzy Logic Controller block
Tune the parameters of the fuzzy system using the
tunefisfunctionDeploy the fuzzy system as described in Deploy Fuzzy Inference Systems
You can also create type-2 fuzzy inference system using the Fuzzy Logic Designer app.
Fuzzy Inference Process for Type-2 Fuzzy Systems
Antecedent Processing
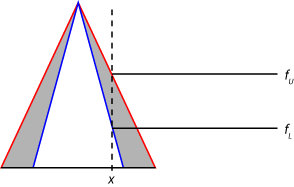
For type-2 fuzzy inference systems, input values are fuzzified by finding the corresponding degree of membership in both the UMFs and LMFs from the rule antecedent. Doing so generates two fuzzy values for each type-2 membership function. For example, the fuzzification in the following figure shows the membership value in the upper membership function (fU) and the lower membership function (fL).
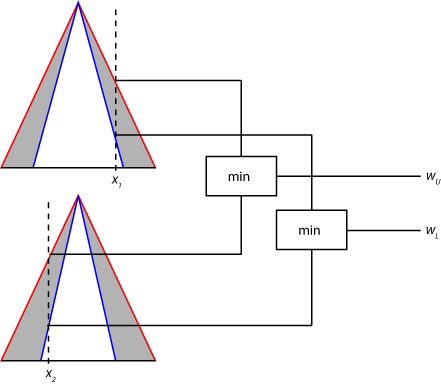
Next, a range of rule firing strengths is found by applying the fuzzy operator to the fuzzified values of the type-2 membership functions, as shown in the following figure. The maximum value of this range (wU) is the result of applying the fuzzy operator to the fuzzy values from the UMFs. The minimum value (wL) is the result of applying the fuzzy operator to the fuzzy values from the LMFs.
Antecedent processing is the same for both Mamdani and Sugeno systems.
Consequent Processing
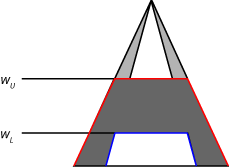
For a Mamdani system, the implication method clips (min
implication) or scales (prod implication) the UMF and LMF of the output
type-2 membership function using the rule firing range limits. This process produces an
output fuzzy set for each rule. The following figure shows the output fuzzy set (dark gray
region) produced by applying min implication to the UMF (red) and LMF
(blue).
For a type-2 Sugeno system, the output level zi for the ith rule is computed in the same manner as for a type-1 Sugeno system.
Here, j is the input index, xj is the value of the jth input variable, and the c terms are the upper membership function parameters.
Unlike a type-1 Sugeno system, the rule firing strengths are not used to process the consequent of each rule. Instead, the output level and rule firing strengths are used during the aggregation process.
Aggregation
The goal of the aggregation stage is to derive a single type-2 fuzzy set from the rule output fuzzy sets.
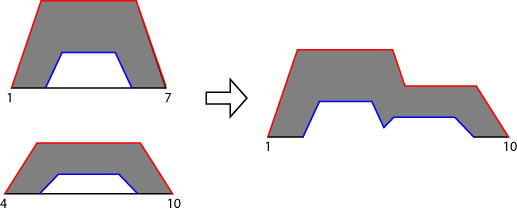
For a type-2 Mamdani system, the software finds an aggregate type-2 fuzzy set by
applying the aggregation method to the UMFs and LMFs of the output fuzzy sets of all the
rules. The following figure shows the aggregation of two type-2 fuzzy sets (the outputs
for a two-rule system) using max aggregation.
For a type-2 Sugeno system, the aggregate fuzzy set is derived using the following steps:
Sort the rule output levels (zi) from all the rules into ascending order. These output level values define the universe of discourse for the aggregate type-2 fuzzy set.
For each output level, define the UMF value using the maximum firing range value from the corresponding rule.
For each output level, define the LMF value using the minimum firing range value from the corresponding rule.
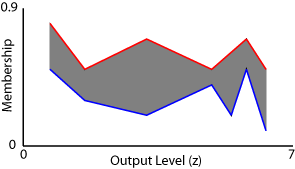
For example, suppose you have a type-2 Sugeno system with seven rules. Further, assume these rules have the following output levels and firing range limits.
| Rule | Output Level (z) | Minimum Firing Value | Maximum Firing Value |
|---|---|---|---|
| 1 | 6.3 | 0.1 | 0.5 |
| 2 | 4.9 | 0.4 | 0.5 |
| 3 | 1.6 | 0.3 | 0.5 |
| 4 | 5.8 | 0.5 | 0.7 |
| 5 | 5.4 | 0.2 | 0.6 |
| 6 | 0.7 | 0.5 | 0.8 |
| 7 | 3.2 | 0.2 | 0.7 |
The following figure shows the aggregated type-2 fuzzy set for this Sugeno system with its associated UMF (red) and LMF (blue).
Type Reduction and Defuzzification
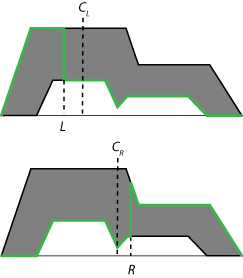
To find the final crisp output value for the inference process, the aggregate type-2 fuzzy set is first reduced to an interval type-1 fuzzy set, which is a range with lower limit cL and upper limit cR. This interval type-1 fuzzy set is commonly referred to as the centroid of the type-2 fuzzy set. In theory, this centroid is the average of the centroids of all the type-1 fuzzy sets embedded in the type-2 fuzzy set. In practice, it is not possible to compute the exact values of cL and cR. Instead, iterative type-reduction methods are used to estimate these values.
For a given aggregate type-2 fuzzy set, the approximate values of cL and cR are the centroids of the following type-1 fuzzy sets (green).
Mathematically, these centroids are found using the following equations. [1]
Here:
N is the number of samples taken across the output variable range, specified using
evalfisOptions.xi is the ith output value sample.
μumf is the upper membership function.
μlmf is the lower membership function.
L and R are switch points that are estimated by the various type-reduction methods. For a list of supported methods, see Type-Reduction Methods.
For both Mamdani and Sugeno systems, the final defuzzified output value (y) is the average of the two centroid values from the type reduction process.
Type-Reduction Methods
Fuzzy Logic Toolbox software supports four built-in type-reduction methods. These algorithms differ in their initialization methods, assumptions, computational efficiency, and terminating conditions.
To set the type-reduction method for a type-2 fuzzy system, set the
TypeReduction property of the mamfistype2 or
sugfistype2 object.
| Method | TypeReduction property Value | Description |
|---|---|---|
| Karnik-Mendel (KM) [2] | "karnikmendel" | First type-reduction method developed |
| Enhanced Karnik-Mendel (EKM) [3] | "ekm" | Modification of the Karnik-Mendel algorithm with an improved initialization, modified termination condition, and improved computational efficiency |
| Iterative algorithm with stop condition (IASC) [4] | "iasc" | Iterative improvement to brute force methods |
| Enhanced iterative algorithm with stop condition (EIASC) [5] | "eiasc" | Improved version of the IASC algorithm |
In general, the computational efficiency of these methods improve as you move down the table.
You can also use your own custom type-reduction method. For more information, see Build Fuzzy Systems Using Custom Functions.
References
[1] Mendel, Jerry M., Hani Hagras, Woei-Wan Tan, William W. Melek, and Hao Ying. Introduction to Type-2 Fuzzy Logic Control: Theory and Applications. Hoboken, New Jersey: IEEE Press, John Wiley & Sons, 2014.
[2] Karnik, Nilesh N., and Jerry M. Mendel. "Centroid of a Type-2 Fuzzy Set." Information Sciences 132, no. 1–4 (February 2001): 195–220. https://doi.org/10.1016/S0020-0255(01)00069-X.
[3] Wu, D. and J.M. Mendel. "Enhanced Karnik-Mendel algorithms." IEEE Transactions on Fuzzy Systems 17 (2009): 923–934.
[4] Duran, K., H. Bernal, and M. Melgarejo. "Improved iterative algorithm for computing the generalized centroid of an interval type-2 fuzzy set," Annual Meeting of the North American Fuzzy Information Processing Society (2008): 190–194
[5] Wu, D. and M. Nie. "Comparison and practical implementations of type-reduction algorithms for type-2 fuzzy sets and systems." Proceedings of FUZZ-IEEE (2011): 2131–2138