magparams
자력계 센서 파라미터
설명
magparams 클래스는 자력계 센서 파라미터 객체를 만듭니다. imuSensor로 IMU를 시뮬레이션할 때 이 객체를 사용하여 자력계를 모델링할 수 있습니다. magparams 모델링에 대한 자세한 내용은 imuSensor의 Algorithms 섹션을 참조하십시오.
생성
설명
params = magarams
params = magparams(Name,Value)Name,Value 쌍 인수를 사용하여 magparams 객체의 속성을 구성합니다. 여기서 Name은 속성 이름이고 Value는 대응하는 값입니다. Name은 작은따옴표('')로 묶어야 합니다. Name1,Value1,...,NameN,ValueN과 같이 여러 개의 이름-값 쌍 인수를 임의의 순서로 지정할 수 있습니다. 지정되지 않은 속성은 디폴트 값을 가집니다.
속성
예제
정상 입력값에서 imuSensor 객체에 대한 자력계 데이터를 생성합니다.
1200의 최대 센서 측정값과 0.1의 분해능으로 자력계 파라미터 객체를 생성합니다. 상수 오프셋 편향은 1입니다. 센서는 의 파워 스펙트럼 밀도를 가집니다. 온도에 의한 편향은 [0.8 0.8 2.4] 입니다. 온도에 의한 스케일링 인자 오차는 0.1%입니다.
params = magparams('MeasurementRange',1200,'Resolution',0.1, ... 'ConstantBias',1,'NoiseDensity',[0.6 0.6 0.9]/sqrt(100), ... 'TemperatureBias',[0.8 0.8 2.4],'TemperatureScaleFactor',0.1);
1000개 샘플에 100Hz의 샘플 레이트를 사용합니다. 자력계 파라미터 객체를 사용하여 imuSensor 객체를 만듭니다.
Fs = 100; numSamples = 1000; t = 0:1/Fs:(numSamples-1)/Fs; imu = imuSensor('accel-mag','SampleRate', Fs, 'Magnetometer', params);
imuSensor 객체에서 자력계 데이터를 생성합니다.
orient = quaternion.ones(numSamples, 1); acc = zeros(numSamples, 3); angvel = zeros(numSamples, 3); [~, magData] = imu(acc, angvel, orient);
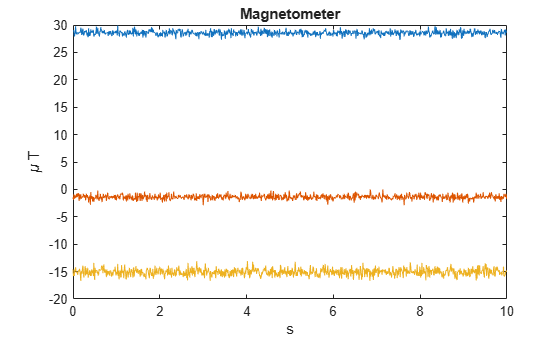
결과로 생성된 자력계 데이터를 플로팅합니다.
plot(t, magData) title('Magnetometer') xlabel('s') ylabel('\mu T')