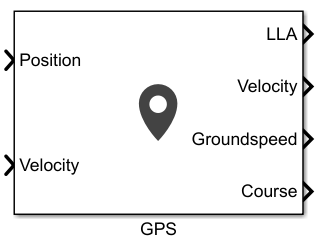
GPS
라이브러리:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
설명
이 블록은 로컬 좌표 프레임 또는 측지 프레임의 입력 위치와 속도를 기반으로, 잡음으로 인해 손상된 GPS 측정값을 출력합니다. 또한 WGS84 지구 모델을 사용하여 로컬 좌표를 LLA(위도-경도-고도) 좌표로 변환합니다.
포트
입력
내비게이션 좌표계의 GPS 수신기 입력 위치를 유한한 실수형 N×3 행렬로 지정합니다. 여기서 N은 현재 프레임에서의 샘플 개수입니다. 행렬 행의 형식은 위치 입력 형식 파라미터의 값에 따라 다릅니다.
위치 입력 형식 파라미터의 값이
Local이면, 위치의 각 행을 로컬 내비게이션 기준 프레임에 대한 카테시안 좌표(단위: 미터)로 지정합니다. 이 로컬 내비게이션 기준 프레임은 기준 프레임 파라미터에 의해 지정되며 기준 위치 파라미터에 의해 지정된 원점을 포함하고 있습니다.위치 입력 형식 파라미터의 값이
Geodetic이면, 위치 입력값의 각 행을 측지 좌표(형식:[latitude longitude altitude])로 지정합니다.latitude값과longitude값의 단위는 도이며,Altitude는 WGS84 타원체 모델 위의 높이이고 단위는 미터입니다.
데이터형: single | double
내비게이션 좌표계의 GPS 수신기 입력 속도(단위: 초당 미터)를 유한한 실수형 N×3 행렬로 지정합니다. 여기서 N은 현재 프레임에서의 샘플 개수입니다. 행렬 행의 형식은 위치 입력 형식 파라미터의 값에 따라 다릅니다.
데이터형: single | double
출력
측지 LLA(위도, 경도, 고도) 좌표계의 GPS 수신기 위치로, 유한한 실수형 N×3 배열로 반환됩니다. 위도와 경도의 단위는 도이며, 북쪽과 동쪽은 양수로 표시됩니다. 고도의 단위는 미터입니다.
여기서 N은 현재 프레임에서의 샘플 개수입니다.
데이터형: single | double
로컬 내비게이션 좌표계의 GPS 수신기 속도(단위: 초당 미터)로, 유한한 실수형 N×3 행렬로 반환됩니다. 여기서 N은 현재 프레임에서의 샘플 개수입니다. 행렬 행의 형식은 위치 입력 형식 파라미터의 값에 따라 다릅니다.
데이터형: single | double
로컬 내비게이션 좌표계의 GPS 수신기 수평 속도 크기(단위: 초당 미터)로, 요소를 N개 가진 유한한 실수형 열 벡터로 반환됩니다.
여기서 N은 현재 프레임에서의 샘플 개수입니다.
데이터형: single | double
로컬 내비게이션 좌표계의 GPS 수신기 수평 속도 방향(단위: 도)으로, 0에서 360 사이의 값을 가지며 요소를 N개 가진 유한한 실수형 열 벡터로 반환됩니다. 북쪽은 0도에 해당하며 동쪽은 90도에 해당합니다.
여기서 N은 현재 프레임에서의 샘플 개수입니다.
데이터형: single | double
파라미터
기준 프레임을 NED(북쪽-동쪽-아래쪽) 또는 ENU(동쪽-북쪽-위쪽)로 지정합니다.
위치 좌표 입력 형식을 Local 또는 Geodetic으로 지정합니다.
이 파라미터를
Local로 설정하면, Position 포트에 대한 입력값은 로컬 내비게이션 프레임에 대한 카테시안 좌표 형식이어야 합니다. 이 로컬 내비게이션 프레임은 기준 프레임 파라미터에 의해 지정되며 기준 위치 파라미터에 의해 수정되고 정의된 원점을 포함하고 있습니다. Velocity 입력 포트에 대한 입력값도 이 로컬 내비게이션 프레임에 대한 값이어야 합니다.이 파라미터를
Geodetic으로 설정하면, Position 포트에 대한 입력값은[latitude longitude altitude]형식의 측지 좌표여야 합니다. Velocity 입력 포트에 대한 입력값도 내비게이션 프레임에 대한 값이어야 합니다. 이 내비게이션 프레임은 기준 프레임 파라미터에 의해 지정되며 Position 포트에 해당하는 원점을 포함하고 있습니다.
측지 좌표 [latitude longitude altitude]에서 로컬 기준 프레임의 원점을 요소를 3개 가진 벡터로 지정합니다. 여기서 altitude는 기준 타원체 모델 WGS84 위의 높이입니다. 기준 위치 값의 단위는 각각 도, 도, 미터입니다. 도(Degree) 형식은 DD(십진수 도)입니다.
종속성
이 파라미터를 활성화하려면 위치 입력 형식 파라미터를 Local로 설정해야 합니다.
수평 위치 정확도를 음이 아닌 실수형 스칼라로 지정합니다(단위: 미터). 수평 위치 정확도는 수평 위치 측정 시 잡음의 표준편차를 지정합니다. 이 값을 늘리면 측정값에 잡음이 추가되어 정확도가 떨어집니다.
조정 가능: Yes
수직 위치 정확도를 음이 아닌 실수형 스칼라로 지정합니다(단위: 미터). 수직 위치 정확도는 수직 위치 측정 시 잡음의 표준편차를 지정합니다. 이 값을 늘리면 측정값에 잡음이 추가되어 정확도가 떨어집니다.
조정 가능: Yes
초당 속도 정확도를 음이 아닌 실수형 스칼라로 지정합니다(단위: 미터). 속도 정확도는 속도 측정 시 잡음의 표준편차를 지정합니다. 이 값을 늘리면 측정값에 잡음이 추가되어 정확도가 떨어집니다.
조정 가능: Yes
전역 위치 잡음 감쇠 인자를 범위 [0, 1] 내의 숫자형 스칼라로 지정합니다. 감쇠 인자를 0으로 설정하면 전역 위치 잡음이 백색 잡음 과정으로 모델링됩니다. 감쇠 인자를 1로 설정하면 전역 위치 잡음이 무작위 행보 과정으로 모델링됩니다.
조정 가능: Yes
mt19937ar 난수 생성기 알고리즘의 초기 시드값을 음이 아닌 정수로 지정합니다.
다음 옵션에서 실행할 시뮬레이션 유형을 선택합니다.
인터프리터형 실행— MATLAB® 인터프리터를 사용하여 모델을 시뮬레이션합니다. 자세한 내용은 Interpreted Execution vs. Code Generation (Simulink) 항목을 참조하십시오.코드 생성— 생성된 C 코드를 사용하여 모델을 시뮬레이션합니다. 시뮬레이션을 처음 실행하면 Simulink®는 블록에 대한 C 코드를 생성합니다. 이 C 코드는 모델이 바뀌지 않는 한 후속 시뮬레이션에 재사용됩니다.
확장 기능
C/C++ 코드 생성
Simulink® Coder™를 사용하여 C 코드나 C++ 코드를 생성할 수 있습니다.
버전 내역
R2021b에 개발됨
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다:
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
사이트 성능 최적화 방법
최고의 사이트 성능을 위해 중국 사이트(중국어 또는 영어)를 선택하십시오. 현재 계신 지역에서는 다른 국가의 MathWorks 사이트 방문이 최적화되지 않았습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)