ctrectcorners
Corner measurements of constant turn-rate rectangular target
Description
Examples
Define sensor reference frame by specifying the sensorParameters input.
sensorPosition = [-5;10;0]; sensorOrientation = rotmat(quaternion([30 0 0],'eulerd','ZYX','frame'),'frame'); sensorParams = struct('Frame','Rectangular', ... 'OriginPosition',sensorPosition,... 'Orientation',sensorOrientation);
Define the constant turn-rate state for the rectangle target.
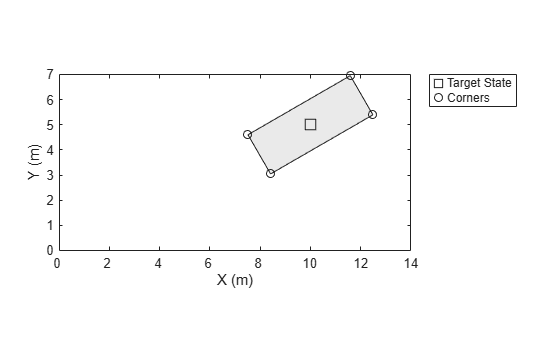
state = [10;5;1.6;30;0.5;4.7;1.8];
Compute corner positions in sensor reference frame.
corners = ctrectcorners(state,sensorParams);
Set up visualization environment using theaterPlot.
% Create a theater plot. tp = theaterPlot; % Plot the state using a track plotter. statePlotter = trackPlotter(tp,'DisplayName','Target State'); % Plot the corners using a detection plotter. cornerPlotter = detectionPlotter(tp,'DisplayName','Corners');
Compute inputs and plot.
targetPos = [state(1) state(2) 0]; targetOrientation = rotmat(quaternion([state(4) 0 0],'eulerd','ZYX','frame'),'frame'); targetDims = struct('Length',state(6),... 'Width',state(7),... 'Height',5,... 'OriginOffset',[0 0 0]); cornerPosGlobal = sensorOrientation*corners(:,:) + sensorPosition; statePlotter.plotTrack(targetPos,targetDims,targetOrientation); cornerPlotter.plotDetection(cornerPosGlobal');
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2018b
See Also
gmphd | trackerPHD | ctrect | ctrectmeas | ctrectmeasjac | ctrectjac | initctrectgmphd